Discrete Varying Notch
Filtro de rechazo de banda en tiempo discreto con coeficientes variables
Bibliotecas:
Control System Toolbox /
Linear Parameter Varying
Descripción
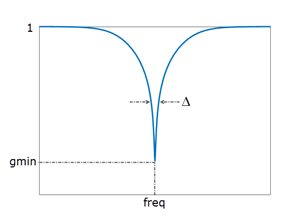
El bloque implementa la discretización de Tustin de un filtro de rechazo de banda en tiempo continuo con coeficientes variables. Introduzca los valores en tiempo continuo de la frecuencia de la banda de rechazo, la ganancia mínima y el coeficiente de amortiguación en los puertos de entrada freq, gmin y damp, respectivamente. Estos parámetros controlan la profundidad y la frecuencia de la banda de rechazo en tiempo continuo como se muestra en la siguiente ilustración. El coeficiente de amortiguación damp controla la anchura de la banda de rechazo Δ; un valor damp mayor implica un valor Δ mayor.
Utilice este y otros bloques de la biblioteca de parámetros lineales variables para implementar elementos de control comunes con parámetros o coeficientes variables. Para más información, consulte Model Gain-Scheduled Control Systems in Simulink.
Precaución
Evite que los coeficientes de filtro dependan de la salida de bloque y. Si se diera esta dependencia, el filtro resultante crea un lazo algebraico, ya que calcular el valor de salida del bloque requiere conocer el valor de salida del bloque. Este lazo algebraico tiende a ser inestable y divergente.
Puertos
Entrada
Salida
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2017b