pzplot
Gráfica de polos y ceros de un modelo de sistema dinámico con opciones de personalización de gráficas adicionales
Sintaxis
Descripción
pzplot permite representar mapas de polos y ceros con una gama más amplia de opciones de personalización de gráficas que pzmap. Puede utilizar pzplot para obtener el identificador de gráfica y usarlo para personalizar la gráfica, como por ejemplo, modificar las etiquetas de los ejes, los límites y las unidades. También puede utilizar pzplot para representar una gráfica de polos y ceros de un conjunto existente de ejes representado por un identificador de ejes. Para personalizar una gráfica existente con el identificador de gráfica:
Obtenga el identificador de gráfica.
Utilice
getoptionspara obtener el conjunto de opciones.Actualice la gráfica mediante
setoptionspara modificar las opciones necesarias.
Para obtener más información, consulte Customizing Response Plots from the Command Line. Para crear mapas de polos y ceros con opciones predeterminadas o para extraer datos de polos y ceros, utilice pzmap.
h = pzplot(sys)sys y devuelve el identificador de gráfica h a la gráfica. x y o indican polos y ceros respectivamente.
h = pzplot(...,plotoptions)plotoptions. Para obtener más información sobre cómo cambiar las propiedades de las gráficas, consulte Formas de personalizar gráficas.
Ejemplos
Gráfica de polos y ceros con título de gráfica personalizado
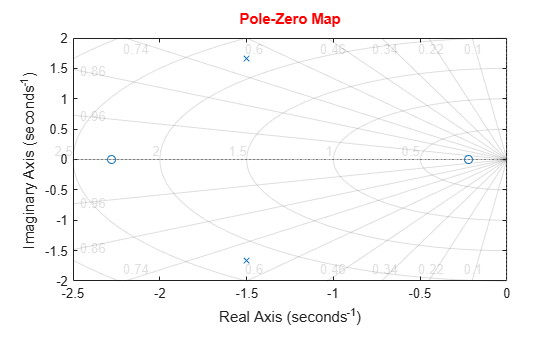
Represente los polos y ceros del sistema de tiempo continuo representado por la siguiente función de transferencia:
sys = tf([2 5 1],[1 3 5]);
h = pzplot(sys);
grid on
Al activar la cuadrícula se muestran líneas de coeficiente de amortiguamiento constante (zeta) y líneas de frecuencia natural constante (wn). Este sistema tiene dos ceros reales, marcados con o en la gráfica. El sistema también tiene un par de polos complejos, marcados con x.
Cambie el color del título de la gráfica. Para ello, utilice el identificador de gráfica h.
p = getoptions(h); p.Title.Color = [1,0,0]; setoptions(h,p);
Gráfica de polos y ceros de múltiples modelos
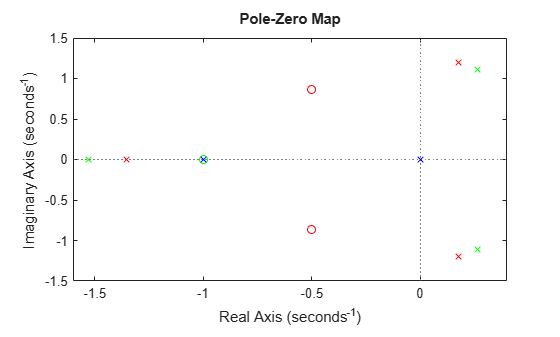
Para este ejemplo, cargue un arreglo de modelos de función de transferencia de 3 por 1.
load('tfArrayMargin.mat','sys'); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Represente los polos y ceros del arreglo de modelos. Defina los colores para cada modelo. Utilice rojo para el primer modelo, verde para el segundo y azul para el tercer modelo del arreglo.
pzplot(sys(:,:,1),'r',sys(:,:,2),'g',sys(:,:,3),'b');
Gráfica de polos y ceros con opciones personalizadas
Represente los polos y ceros del sistema de tiempo continuo representado por la siguiente función de transferencia con un conjunto de opciones personalizado:
Cree el conjunto de opciones personalizado con pzoptions.
plotoptions = pzoptions;
Para este ejemplo, especifique que la cuadrícula esté visible.
plotoptions.Grid = 'on';Utilice las opciones indicadas para crear un mapa de polos y ceros de la función de transferencia.
h = pzplot(tf([2 5 1],[1 3 5]),plotoptions);
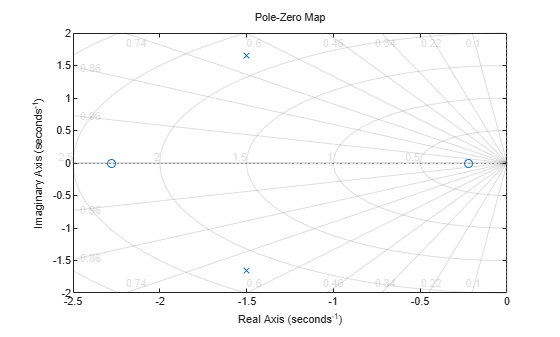
Al activar la cuadrícula se muestran líneas de coeficiente de amortiguamiento constante (zeta) y líneas de frecuencia natural constante (wn). Este sistema tiene dos ceros reales, marcados con o en la gráfica. El sistema también tiene un par de polos complejos, marcados con x.
Argumentos de entrada
Argumentos de salida
Sugerencias
Historial de versiones
Introducido antes de R2006a
Consulte también
getoptions | pzmap | setoptions | iopzplot | pzoptions
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)