setDelayModel
Construct state-space model with internal delays
Syntax
sys = setDelayModel(H,tau)
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)
Description
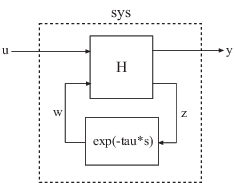
sys = setDelayModel(H,tau)sys obtained by LFT interconnection of the
state-space model H with the vector of internal delays
tau, as shown:
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)sys described by the following
equations:
tau (τ) is the vector of internal delays in
sys.
Input Arguments
|
State-space ( |
|
Vector of internal delays of For continuous-time models, express For discrete-time models, express |
|
Set of state-space matrices that, with the internal delay vector
|
Tips
setDelayModelis an advanced operation and is not the natural way to construct models with internal delays. See Time Delays in Linear Systems for recommended ways of creating internal delays.The syntax
sys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau)constructs a continuous-time model. You can construct the discrete-time model described by the state-space equationsTo do so, first construct
sysusingsys = setDelayModel(A,B1,B2,C1,C2,D11,D12,D21,D22,tau). Then, usesys.Tsto set the sample time.
Version History
Introduced in R2007a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)