Use Complete Poll in Pattern Search
The patternsearch solver attempts to find a minimum by evaluating the objective function at a pattern of points. The solver can evaluate all the points in the pattern, called a complete poll. Or, to try to save time, patternsearch can stop the evaluations as soon as it locates a point with a better objective function value. This example shows some of the effects of using a complete poll.
Consider the following objective function.
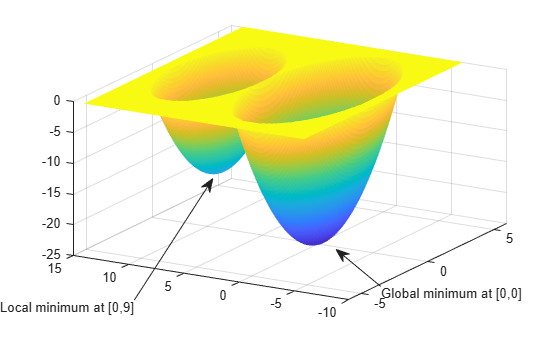
The global minimum of the function occurs at (0, 0), where its value is –25. However, the function also has a local minimum at (0, 9), where its value is –16.
This code creates the function.
function z = poll_example(x) if x(1)^2 + x(2)^2 <= 25 z = x(1)^2 + x(2)^2 - 25; elseif x(1)^2 + (x(2) - 9)^2 <= 16 z = x(1)^2 + (x(2) - 9)^2 - 16; else z = 0; end end
Plot the function.
[X,Y] = meshgrid(-6:.1:6,-6:.1:14); Z = zeros(size(X)); for i = 1:size(X,1) for j=1:size(X,2) Z(i,j) = poll_example([X(i,j),Y(i,j)]); end end surf(X,Y,Z,LineStyle="none"); view([-60,30]) annotation("textarrow",[0.24 0.38],... [0.11 0.47],String="Local minimum at [0,9]"); annotation("textarrow",[0.68 0.6],... [0.15 0.26],String="Global minimum at [0,0]");
To search for the minimum, run a pattern search on the function. To have patternsearch use he standard mesh, set the ScaleMesh option to false.
options = optimoptions("patternsearch",Display="iter",... ScaleMesh=false); [x,fval] = patternsearch(@poll_example,[0,5],... [],[],[],[],[],[],[],options)
Iter Func-count f(x) MeshSize Method
0 1 0 1
1 3 -7 2 Successful Poll
2 5 -15 4 Successful Poll
3 9 -15 2 Refine Mesh
4 13 -15 1 Refine Mesh
5 15 -16 2 Successful Poll
6 19 -16 1 Refine Mesh
7 23 -16 0.5 Refine Mesh
8 27 -16 0.25 Refine Mesh
9 31 -16 0.125 Refine Mesh
10 35 -16 0.0625 Refine Mesh
11 39 -16 0.03125 Refine Mesh
12 43 -16 0.01562 Refine Mesh
13 47 -16 0.007812 Refine Mesh
14 51 -16 0.003906 Refine Mesh
15 55 -16 0.001953 Refine Mesh
16 59 -16 0.0009766 Refine Mesh
17 63 -16 0.0004883 Refine Mesh
18 67 -16 0.0002441 Refine Mesh
19 71 -16 0.0001221 Refine Mesh
20 75 -16 6.104e-05 Refine Mesh
21 79 -16 3.052e-05 Refine Mesh
22 83 -16 1.526e-05 Refine Mesh
23 87 -16 7.629e-06 Refine Mesh
24 91 -16 3.815e-06 Refine Mesh
25 95 -16 1.907e-06 Refine Mesh
26 99 -16 9.537e-07 Refine Mesh
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x = 1×2
0 9
fval = -16
To understand what patternsearch does in its poll, evaluate the algorithmic steps. The algorithm begins by evaluating the function at the initial point, . The poll evaluates the following during its first iterations.
As soon as the search polls the mesh point (0, 6), at which the objective function value is less than at the initial point, it stops polling the current mesh and sets the current point at the next iteration to (0, 6). Consequently, the search moves toward the local minimum at (0, 9) at the first iteration. You see this by looking at the first two lines of the command line display.
Iter Func-count f(x) MeshSize Method
0 1 0 1
1 3 -7 2 Successful Poll
Note that the pattern search performs only two evaluations of the objective function at the first iteration, increasing the total function count from 1 to 3.
Next, set the UseCompletePoll option to true and rerun the optimization.
options.UseCompletePoll = true;
[x,fval] = patternsearch(@poll_example,[0,5],...
[],[],[],[],[],[],[],options)Iter Func-count f(x) MeshSize Method
0 1 0 1
1 5 -9 2 Successful Poll
2 9 -21 4 Successful Poll
3 13 -21 2 Refine Mesh
4 17 -25 4 Successful Poll
5 21 -25 2 Refine Mesh
6 25 -25 1 Refine Mesh
7 29 -25 0.5 Refine Mesh
8 33 -25 0.25 Refine Mesh
9 37 -25 0.125 Refine Mesh
10 41 -25 0.0625 Refine Mesh
11 45 -25 0.03125 Refine Mesh
12 49 -25 0.01562 Refine Mesh
13 53 -25 0.007812 Refine Mesh
14 57 -25 0.003906 Refine Mesh
15 61 -25 0.001953 Refine Mesh
16 65 -25 0.0009766 Refine Mesh
17 69 -25 0.0004883 Refine Mesh
18 73 -25 0.0002441 Refine Mesh
19 77 -25 0.0001221 Refine Mesh
20 81 -25 6.104e-05 Refine Mesh
21 85 -25 3.052e-05 Refine Mesh
22 89 -25 1.526e-05 Refine Mesh
23 93 -25 7.629e-06 Refine Mesh
24 97 -25 3.815e-06 Refine Mesh
25 101 -25 1.907e-06 Refine Mesh
26 105 -25 9.537e-07 Refine Mesh
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x = 1×2
0 0
fval = -25
This time, the pattern search finds the global minimum at (0, 0). The difference between this run and the previous one is that with UseCompletePoll set to true, at the first iteration the pattern search polls all four mesh points.
Because the last mesh point has the lowest objective function value, the pattern search selects it as the current point at the next iteration. The first two lines of the command-line display show this.
Iter Func-count f(x) MeshSize Method
0 1 0 1
1 5 -9 2 Successful Poll
In this case, the objective function is evaluated four times at the first iteration. As a result, the pattern search moves toward the global minimum at (0, 0).
The following figure compares the sequence of points returned when Complete poll is set to Off with the sequence when Complete poll is On. The code for the function appears after the figure.
graph_poll_example
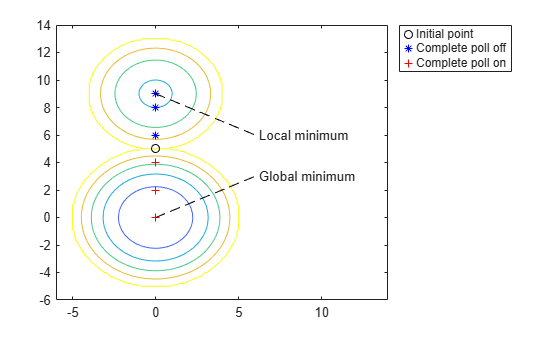
function graph_poll_example ff = []; tt = []; [X,Y] = meshgrid(-6:.1:14,-6:.1:14); Z = zeros(size(X)); for i = 1:size(X,1) for j=1:size(X,2) Z(i,j) = poll_example([X(i,j),Y(i,j)]); end end contour(X,Y,Z); hold on h = plot(0,5,"ko"); opts = optimoptions("patternsearch", ... OutputFcn=@plotpnt, ... UseCompletePoll=false, ... Display="off",... ScaleMesh=false); [thex,thefv] = patternsearch(@poll_example,[0,5],... [],[],[],[],[],[],[],opts); opts.UseCompletePoll=true; [thex,thefv] = patternsearch(@poll_example,[0,5],... [],[],[],[],[],[],[],opts); hold off line([0,6],[9,6],Color="k",LineStyle="--") line([0,6],[0,3],Color="k",LineStyle="--") text(6.2,6,"Local minimum") text(6.2,3,"Global minimum") legend([h,ff,tt],"Initial point","Complete poll off","Complete poll on") function [stop,opts,optchanged] = plotpnt(optimvalues,opts,flag) if strcmp(flag,"iter") if opts.UseCompletePoll == true tt = plot(optimvalues.x(1),optimvalues.x(2),"r+"); else ff = plot(optimvalues.x(1),optimvalues.x(2),"b*"); end end stop = false; optchanged = false; end end