Apply Initial Conditions When Simulating Identified Linear Models
This example shows the workflow for obtaining and using estimated initial conditions when you simulate models to validate model performance against measured data.
Use initial conditions (ICs) when you want to simulate a model in order to validate model performance by comparing the simulated response to measured data. If your measurement data corresponds to a system that does not start at rest, a simulation that assumes a resting start point results in a mismatch. The simulated and measured responses do not agree at the beginning of the simulation.
For state-space models, the initial state vector is sufficient to describe initial conditions. For other LTI models, the initialCondition object allows you to represent ICs in the form of the free response of your model to the initial conditions. This representation is in state-space form, as shown in the following equation:
Here, is the free response that the initialCondition encapsulates. and are the A and C matrices of the state-space form of your model. is the corresponding initial state vector. The free response does not include B and D matrices because the IC free response is independent of input signals. Although the initialCondition object packages the state-space form, you can use the information to model a free response for any LTI system. The simulation software computes the free and forced responses separately and then adds them together to obtain the total response.
Prepare Data
Load the data and split it into estimation and validation data sets. For this example, the splits occur where the output data has a visibly nonzero start point.
load iddata2 z2 z2e = z2(10:210); z2v = z2(210:400); plot(z2e,z2v)
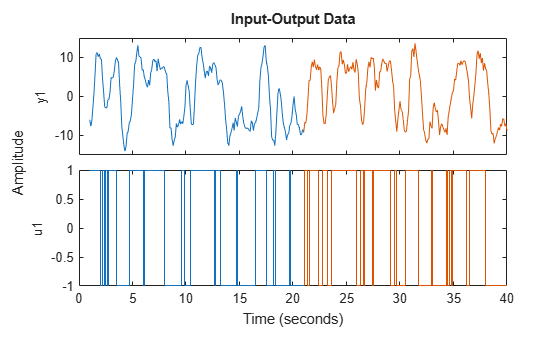
Display the first output sample for each data set.
z2e.y(1)
ans = -5.9588
z2v.y(1)
ans = -9.2141
Estimate Transfer Function Model
Using the estimation data, estimate a second-order transfer function model and return the initial condition ic. Display ic.
np = 2; nz = 1; [sys_tf,ic] = tfest(z2e,np,nz); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-1.6158 5.1969]
Ts: 0
ic represents the free response of the transfer function model, in state-space form, to the initial condition.
A = ic.A
A = 2×2
-3.4145 -5.6635
4.0000 0
C = ic.C
C = 1×2
-1.6158 5.1969
The X0 property contains the initial state vector.
X0 = ic.X0
X0 = 2×1
-0.5053
-1.2941
Simulate Model
Simulate the model. First, as a reference, simulate the model without incorporating ic. Plot the simulated response with the estimation data.
y_no_ic = sim(sys_tf,z2e); plot(y_no_ic,z2e) legend(Interpreter="none") title('Transfer Function Model - No IC Specification')
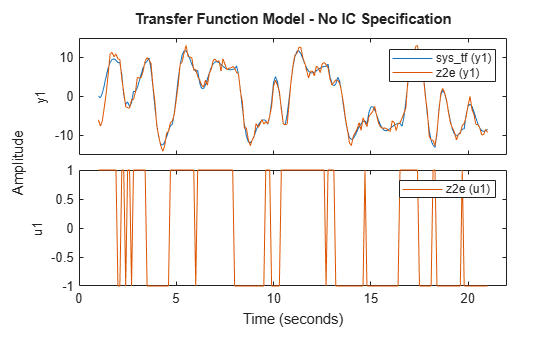
The simulated and measured responses do not agree at the start of the simulation.
Incorporate ic. To do so, first initialize opt to the option set simOptions. Specify ic as the 'InitialCondition' setting. Simulate the model and plot the results.
opt = simOptions; opt.InitialCondition = ic; y_ic = sim(sys_tf,z2e,opt); figure plot(y_ic,z2e) legend(Interpreter="none") title('Transfer Function Model - ICs Specified')
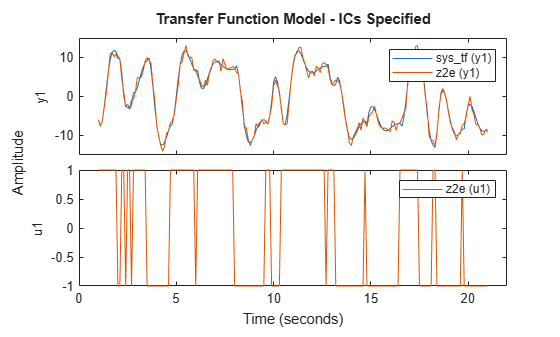
The responses now agree more closely at the start of the simulation.
Obtain ICs for Validation Data
ic represents the ICs only for the estimation data set. If you want to run a simulation using the validation inputs and compare the results with the validation output, you must obtain the ICs for the validation data set. To do so, use compare. You can use compare to estimate ICs for any combination of model and measurement data.
[yv,fitv,icv] = compare(z2v,sys_tf); icv
icv =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-1.6158 5.1969]
Ts: 0
Display the A, C, and X0 properties of icv.
Av = icv.A
Av = 2×2
-3.4145 -5.6635
4.0000 0
Cv = icv.C
Cv = 1×2
-1.6158 5.1969
X0v = icv.X0
X0v = 2×1
0.4512
-1.5068
For this case, the A and C matrices representing the free-response model are identical to the ic.A and ic.C values in the original estimation. However, the initial state vector X0v is different from ic.X0.
Specify icv as the 'InitialCondition' setting in opt and simulate the model using the validation data. Plot the simulated and measured responses.
opt.InitialCondition = icv; y_ic = sim(sys_tf,z2v,opt); plot(y_ic(:,:,[]),z2v(:,:,[])) legend('Model Response','Output Data') title('Transfer Function Model Response For Validation Data')
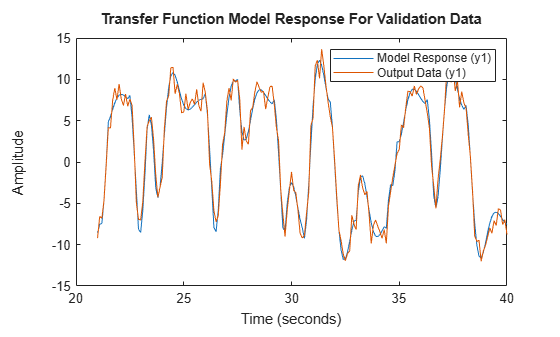
The simulated and measured responses have good agreement at the start of the simulation.
Apply ICs to Simulation of Converted Model
You can apply the ICs when you convert your model to another form.
Convert sys_tf to an idpoly model. Simulate the converted model, preserving the current SimOptions 'InitialCondition' setting, icv, in opt.
sys_poly = idpoly(sys_tf); y_poly = sim(sys_poly,z2v,opt); plot(y_poly(:,:,[]),y_ic(:,:,[]),z2v(:,:,[])) legend('idpoly Model Response','idtf Model Response','Output Data') title('Converted Polynomial Model')
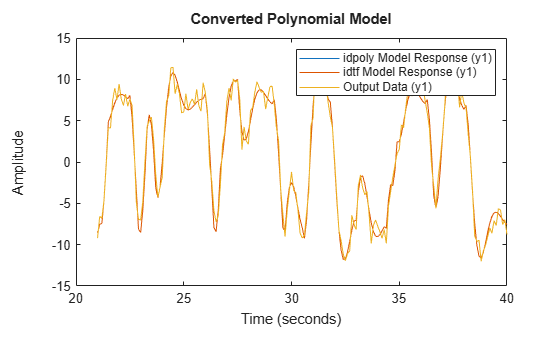
The sys_tf and sys_poly responses appear identical.
Apply ICs to Simulation of State-Space Model
State-space models can use initial conditions represented either by a single numeric initial state vector or by an initialCondition object.
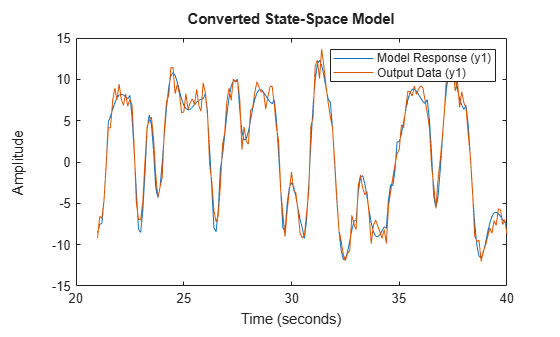
When you convert sys_tf to an idss model, you can again use icv by retaining the icv setting in opt.
sys_ss = idss(sys_tf); y_ss = sim(sys_ss,z2v,opt); plot(y_ss(:,:,[]),z2v(:,:,[])) legend('Model Response','Output Data') title('Converted State-Space Model')
When you use compare or a state-space estimation function such as ssest, the function returns the initial state vector x0. Estimate the state-space model sys_ss2 using z2e and use compare to obtain ICs corresponding to z2v.
sys_ss2 = ssest(z2e,2); [yvss,fitvss,x0] = compare(z2v,sys_ss2); x0
x0 = 2×1
-0.1061
0.0097
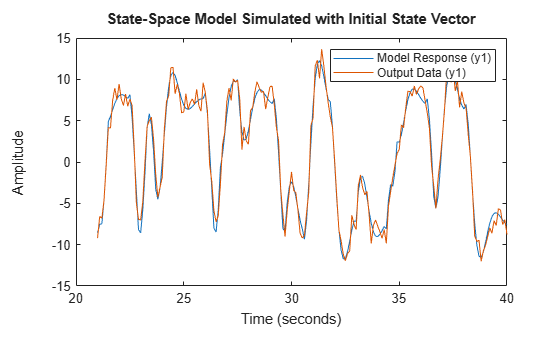
x0 is a numeric vector. Specify x0 as the 'InitialCondition' setting in opt and simulate the response.
opt.InitialCondition = x0; y_ss2 = sim(sys_ss2,z2v,opt); plot(y_ss2(:,:,[]),z2v(:,:,[])) legend('Model Response','Output Data') title('State-Space Model Simulated with Initial State Vector')
Convert State-Space Initial State Vector to initialCondition Object
If your original model is a state-space model and you want to convert the model into a polynomial or transfer function model and apply the same initial conditions, you must convert the initial state vector into an initialCondition object.
Extract and display the A, C, and Ts properties from sys_ss2.
As = sys_ss2.A
As = 2×2
-1.7643 -3.7716
5.2918 -1.7327
Cs = sys_ss2.C
Cs = 1×2
82.9765 25.5146
Tss = sys_ss2.Ts
Tss = 0
The A and C matrices that are estimated using ssest have different values than the A and C matrices estimated in icv using tfest. There are infinitely many state-space representations of a given linear model. The two pairs of matrices, along with the associated initial state vectors, are equivalent and produce the same free response.
Create the initialCondition object ic_ss2 using sys_ss2 model properties and the initial state vector x0 you obtained when you used compare.
ic_ss2 = initialCondition(As,x0,Cs,Tss)
ic_ss2 =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [82.9765 25.5146]
Ts: 0
Convert sys_ss2 into a transfer function model and simulate the converted model using ic_ss2 as the 'InitialCondition' setting.
sys_tf2 = idtf(sys_ss2); opt.InitialCondition = ic_ss2; y_tf2 = sim(sys_tf2,z2v,opt); plot(y_tf2(:,:,[]),z2v(:,:,[])) legend('Model Response','Output Data') title('Transfer Function Model Converted from State-Space Model')
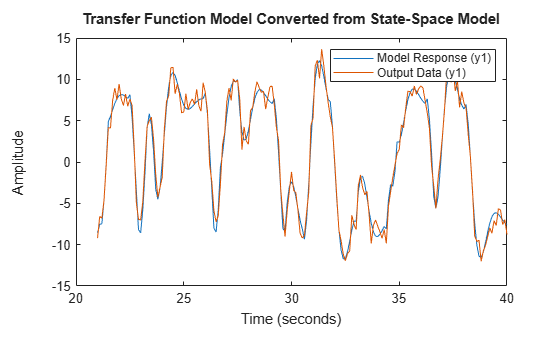
Using the constructed initialCondition object ic_ss2 produces a similar response to simulated responses that use directly estimated initialCondition objects.
See Also
initialCondition | compare | ssest | tfest | idss | idpoly | simOptions | sim