Simular el ruido del sensor GPS
Este ejemplo muestra cómo utilizar el bloque GPS para agregar ruido del sensor GPS a las entradas de posición y velocidad en Simulink®.
Examinar modelo
Abra el modelo de Simulink.
open_system("GPSNoiseModel.slx");
Este modelo genera los valores X, Y, Z, tanto para la posición como para la velocidad, como ondas sinusoidales individuales y los combina mediante bloques Mux. Debido a que el bloque GPS requiere señales discretas, la posición y la velocidad combinadas pasan a través de los bloques Rate Transition a las entradas de los puertos Position y Velocity del bloque GPS. El bloque GPS tiene configuraciones de parámetros predeterminadas, excepto para la Precisión de posición vertical, que está establecida en 1.5 debido a la escala de la posición y la velocidad.
Compare las salidas del bloque GPS con los valores reales de la señal utilizando bloques Scope. Para hacer esto para la posición, las coordenadas de posición local deberán convertirse a coordenadas LLA. Utilice la función ned2lla en el bloque MATLAB Function para convertir las coordenadas NED a coordenadas LLA.
Un bloque MATLAB Function utiliza la función ned2lla para convertir las coordenadas de posición local de los valores de señal reales a coordenadas geodésicas. Luego, el modelo representa las salidas del bloque GPS frente a los valores reales de la señal.
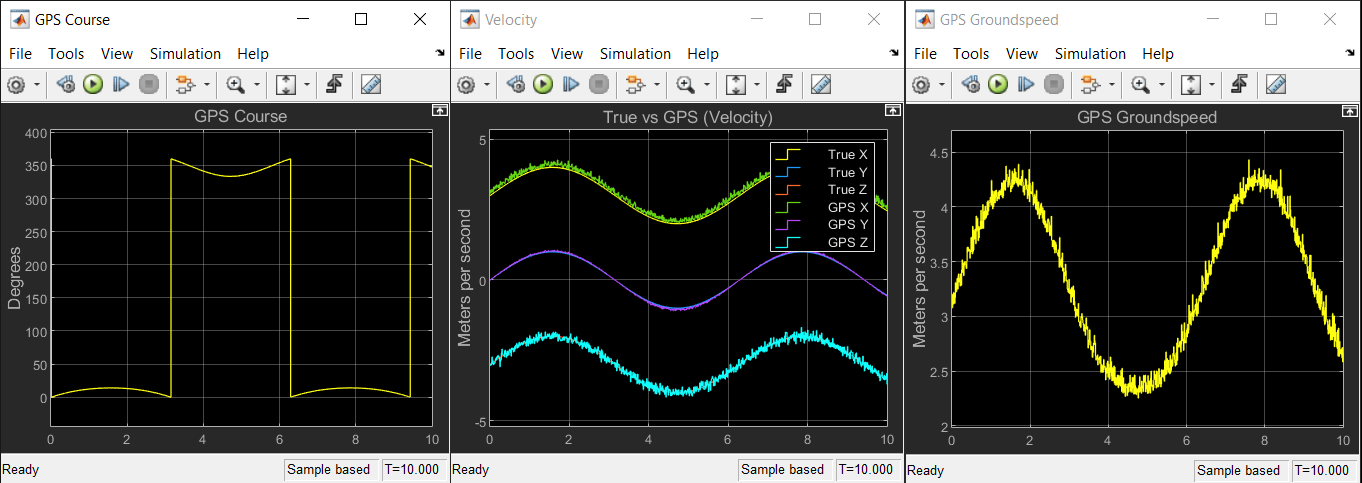
Ejecutar modelo
Ejecute el modelo. Los scopes de salida muestran el efecto del ruido del sensor GPS en las salidas original y de velocidad.