Actuador hidráulico con controlador de posición analógico
Este ejemplo muestra cómo se puede utilizar la biblioteca Foundation para modelar sistemas que amplían dominios eléctricos, mecánicos y de líquidos isotérmicos. En el modelo, un sistema hidráulico implementado en el dominio de líquidos isotérmicos controla la posición de la carga mecánica en respuesta a una demanda de referencia de tensión. Si la demanda de referencia es cero, el desplazamiento del actuador hidráulico (y de la carga) es cero, y si la referencia es +5 voltios, el desplazamiento es de 100 mm.
El controlador proporcional más integral se implementa utilizando amplificadores operacionales, cuya etapa final se configura como una fuente de corriente. A continuación, se acciona un motor de torque con términos de resistencia e inductancia modelados. El motor de torque acciona directamente el distribuidor, que a su vez controla el circuito hidráulico principal que alimenta el cilindro hidráulico. Por último, el cilindro acciona una carga mecánica genérica.
Un modelo con este nivel de fidelidad ofrece soporte para el diseño y las pruebas del controlador de la servoválvula. Incluye los modos electromecánicos de alta frecuencia que afectan a los márgenes de estabilidad, así como los efectos del caudal no lineales cuando se exigen grandes demandas al sistema hidráulico.
Modelo

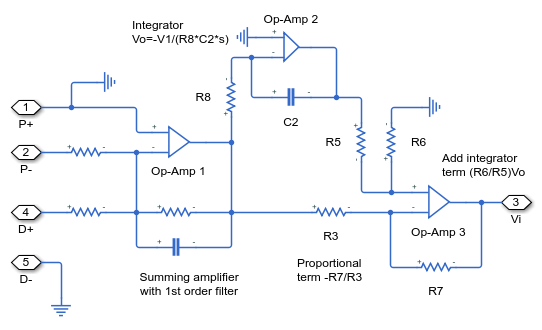
Actuator Control Circuit Subsystem
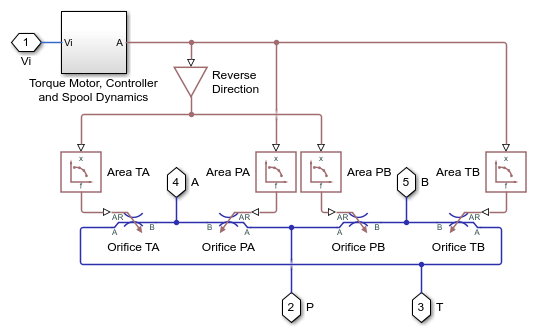
Spool Valve Subsystem
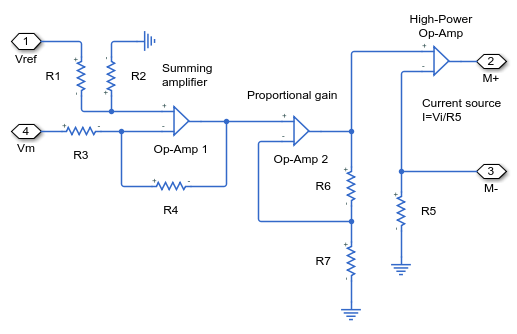
Motor Control Circuit Subsystem
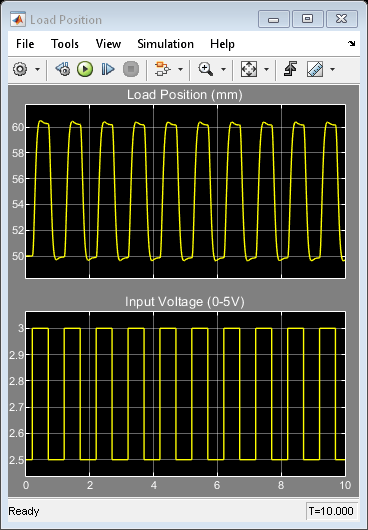
Resultados de simulación a partir de scopes
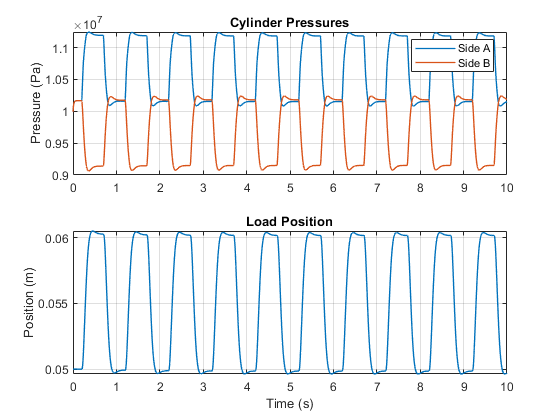
Resultados de simulación a partir del registro de Simscape
La siguiente figura muestra las presiones del cilindro y la posición de la carga representadas en una gráfica de MATLAB. También puede ver los datos en Results Explorer de Simscape y en Simulation Data Inspector.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)