lidarSLAM
Description
The lidarSLAM class performs simultaneous localization and
mapping (SLAM) for lidar scan sensor inputs. The SLAM algorithm takes in lidar scans and
attaches them to a node in an underlying pose graph. The algorithm then correlates the
scans using scan matching. It also searches for loop closures, where scans overlap
previously mapped regions, and optimizes the node poses in the pose graph.
Creation
Syntax
Description
slamObj = lidarSLAM
slamObj = lidarSLAM(mapResolution,maxLidarRange)MapResolution
and MaxLidarRange properties based on the inputs.
slamObj = lidarSLAM(mapResolution,maxLidarRange,maxNumScans)maxNumScans is a positive integer. This scan
limit is only required when generating code.
Properties
Object Functions
addScan | Add scan to lidar SLAM map |
copy | Copy lidar SLAM object |
removeLoopClosures | Remove loop closures from pose graph |
scansAndPoses | Extract scans and corresponding poses |
show | Plot scans and robot poses |
Examples
Perform SLAM Using Lidar Scans
Use a lidarSLAM object to iteratively add and compare lidar scans and build an optimized pose graph of the robot trajectory. To get an occupancy map from the associated poses and scans, use the buildMap function.
Load Data and Set Up SLAM Algorithm
Load a cell array of lidarScan objects. The lidar scans were collected in a parking garage on a Husky® robot from ClearPath Robotics®. Typically, lidar scans are taken at a high frequency and each scan is not needed for SLAM. Therefore, down sample the scans by selecting only every 40th scan.
load garage_fl1_southend.mat scans scans = scans(1:40:end);
To set up the SLAM algorithm, specify the lidar range, map resolution, loop closure threshold, and search radius. Tune these parameters for your specific robot and environment. Create the lidarSLAM object with these parameters.
maxRange = 19.2; % meters resolution = 10; % cells per meter slamObj = lidarSLAM(resolution,maxRange); slamObj.LoopClosureThreshold = 360; slamObj.LoopClosureSearchRadius = 8;
Add Scans Iteratively
Using a for loop, add scans to the SLAM object. The object uses scan matching to compare each added scan to previously added ones. To improve the map, the object optimizes the pose graph whenever it detects a loop closure. Every 10 scans, display the stored poses and scans.
for i = 1:numel(scans) addScan(slamObj,scans{i}); if rem(i,10) == 0 show(slamObj); end end

View Occupancy Map
After adding all the scans to the SLAM object, build an occupancyMap map by calling buildMap with the scans and poses. Use the same map resolution and max range you used with the SLAM object.
[scansSLAM,poses] = scansAndPoses(slamObj);
occMap = buildMap(scansSLAM,poses,resolution,maxRange);
figure
show(occMap)
title('Occupancy Map of Garage')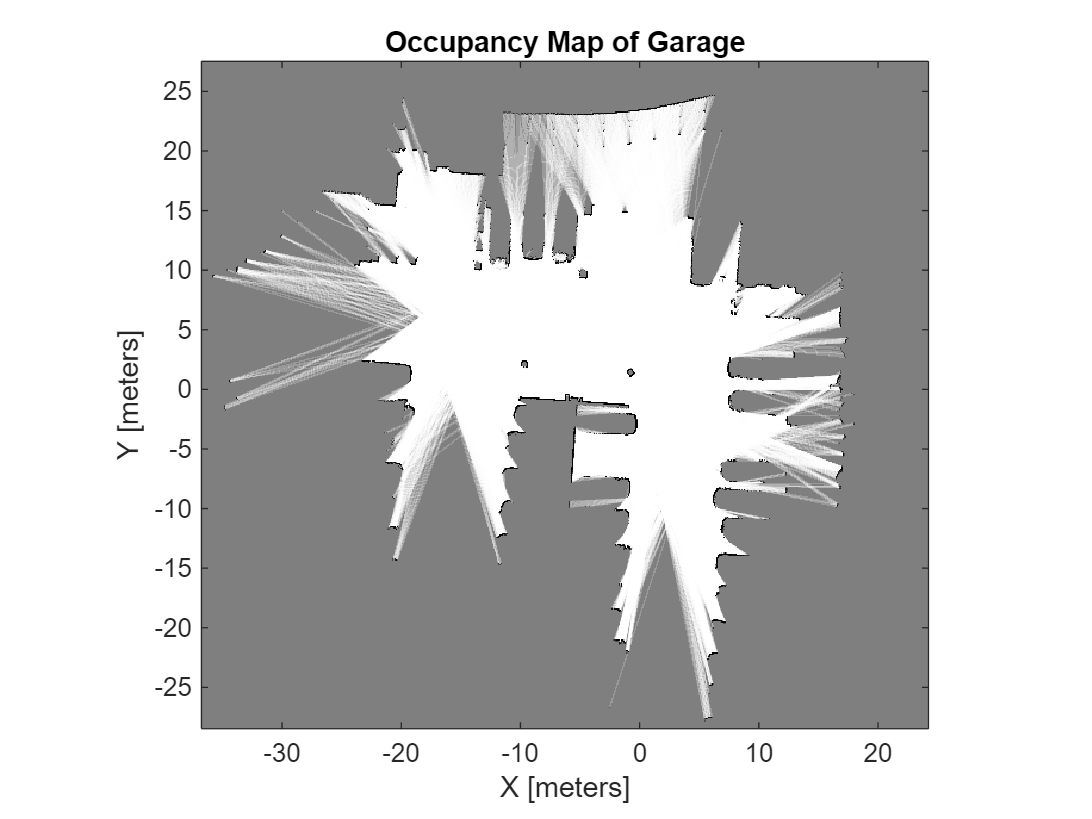
More About
References
[1] Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor. "Real-Time Loop Closure in 2D LIDAR SLAM." 2016 IEEE International Conference on Robotics and Automation (ICRA). 2016.
Extended Capabilities
Version History
Introduced in R2019b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)