Suspensión de un automóvil
En este ejemplo se muestra cómo modelar un sistema simplificado de medio automóvil que incluye suspensiones verticales independientes en los ejes delantero y trasero. El modelo también incluye grados de libertad del cabeceo del cuerpo y el movimiento vertical. El ejemplo proporciona una descripción del modelo para mostrar cómo utilizar la simulación para investigar las características del trayecto. Puede utilizar este modelo junto con una simulación de un sistema de propulsión para estudiar la redistribución longitudinal resultante de los cambios en la configuración del acelerador.
Análisis y física
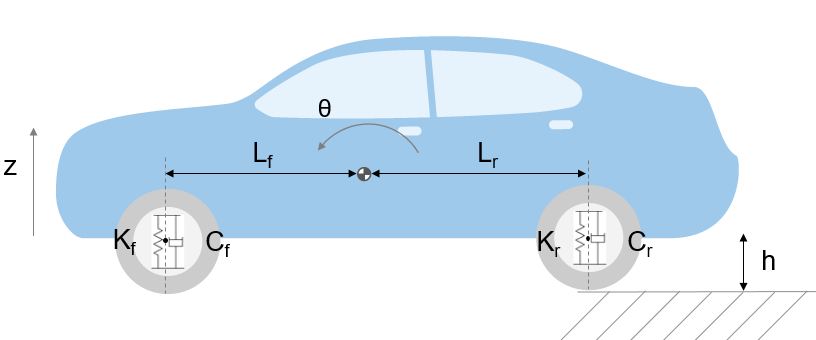
La ilustración muestra las características modeladas del medio automóvil. Las suspensiones delantera y trasera se modelan como sistemas de resorte-amortiguador. Un modelo más detallado incluye un modelo del neumático y las no linealidades del amortiguador, como la amortiguación dependiente de la velocidad (con mayor amortiguación durante el rebote que durante la compresión). El cuerpo del vehículo tiene grados de libertad del cabeceo y el movimiento vertical, que se representan con cuatro estados en el modelo: desplazamiento vertical, velocidad vertical, desplazamiento angular de cabeceo y velocidad angular de cabeceo. Se puede implementar un modelo completo con seis grados de libertad mediante bloques de álgebra vectorial para realizar transformaciones de ejes y cálculos de fuerza, desplazamiento y velocidad.
La ecuación 1 describe la influencia de la suspensión delantera en el movimiento vertical (es decir, grado de libertad vertical):

donde:







Las ecuaciones 2 describen los momentos de cabeceo debidos a la suspensión.



donde:

Las ecuaciones 3 resuelven las fuerzas y los momentos que dan lugar al movimiento del cuerpo, de acuerdo con la segunda ley de Newton:


donde:



Modelo
Abra el modelo.
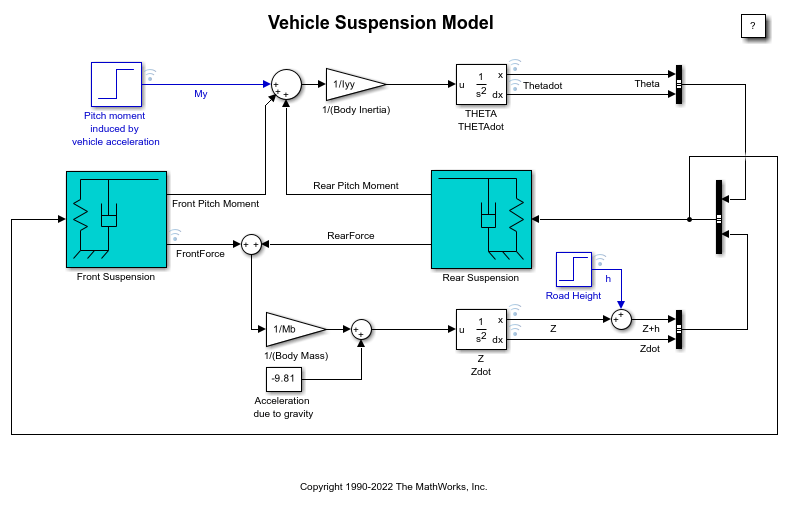
El modelo de suspensión tiene dos entradas y ambos bloques de entrada se representan en azul en el diagrama del modelo. La primera entrada es la altura de la carretera. Aquí, una entrada de paso corresponde al desplazamiento del vehículo por la superficie de una carretera con un cambio de paso en la altura. La segunda entrada es una fuerza horizontal que actúa a través del centro de las ruedas, como resultado de maniobras de frenado o aceleración. Esta entrada solo aparece como un momento sobre el eje de cabeceo porque el movimiento longitudinal del cuerpo no se ha modelado.
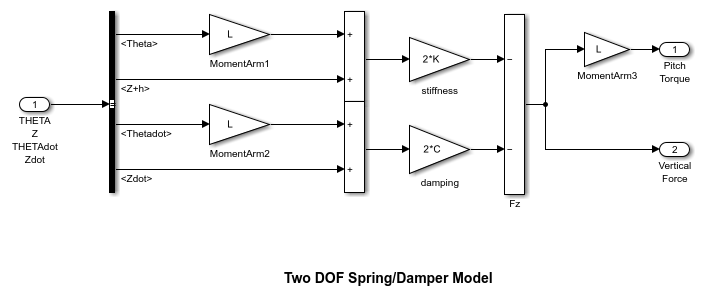
El subsistema de resorte-amortiguador que modela las suspensiones delantera y trasera se muestra arriba. Haga clic con el botón secundario en el bloque Front Suspension o Rear Suspension. Seleccione Edit Mask > Look Under Mask para ver el subsistema de suspensión delantera o trasera. Los subsistemas de suspensión modelan las ecuaciones 1-3. El diagrama de Simulink® utiliza los bloques Gain y Summation para implementar las ecuaciones 1-3.
Las diferencias entre la parte delantera y la parte trasera se tienen en cuenta de la siguiente forma. Dado que el subsistema es un bloque enmascarado, se puede introducir un conjunto de datos diferente (L, K y C) para cada instancia. Además, L se considera la coordenada cartesiana x, negativa o positiva con respecto al origen o al centro de gravedad. Por lo tanto, Kf, Cf y -Lf se utilizan para el bloque de suspensión delantera, y Kr, Cr y Lr se utilizan para el bloque de suspensión trasera.
Ejecutar la simulación
Para ejecutar este modelo, en la pestaña Simulation, haga clic en Run. Las condiciones iniciales se cargan en el área de trabajo del modelo desde el archivo sldemo_suspdat.m. Para ver el contenido del área de trabajo del modelo, en Simulink Editor, en la pestaña Modeling, en Design, seleccione Model Explorer. En Model Explorer, busque en el contenido del modelo sldemo_suspn y seleccione "Model Workspace". Cargar las condiciones iniciales en el área de trabajo del modelo evita las modificaciones accidentales de parámetros y mantiene limpio el área de trabajo de MATLAB.
El modelo registra los datos relevantes del área de trabajo de MATLAB en una estructura de datos denominada sldemo_suspn_output. Escriba el nombre de la estructura para ver los datos que contiene.

Los resultados de simulación se muestran arriba. Los resultados se representan en el archivo sldemo_suspgraph.m. Las condiciones iniciales predeterminadas se proporcionan en la tabla 1.
Tabla 1: Condiciones iniciales predeterminadas
Lf = 0.9; % front hub displacement from body gravity center (m) Lr = 1.2; % rear hub displacement from body gravity center (m) Mb = 1200; % body mass (kg) Iyy = 2100; % body moment of inertia about y-axis (kg m^2) kf = 28000; % front suspension stiffness (N/m) kr = 21000; % rear suspension stiffness (N/m) cf = 2500; % front suspension damping (N sec/m) cr = 2000; % rear suspension damping (N sec/m)
Este modelo permite simular los efectos de cambiar la amortiguación y la rigidez de la suspensión, investigando así el tradeoff entre comodidad y rendimiento. En general, los automóviles de carreras tienen resortes muy rígidos con un factor de amortiguación elevado, mientras que los vehículos de pasajeros cuentan con resortes más blandos y una respuesta más oscilatoria.