Specify Steady-State Operating Point for Response Optimization
What Is a Steady-State Operating Point?
An operating point of a dynamic system defines the states and root-level input signals of the model at a specific time. For example, in a car engine model, variables such as engine speed, throttle angle, engine temperature, and surrounding atmospheric conditions typically describe the operating point.
A steady-state operating point of a model, also called an equilibrium or trim condition, includes state variables that do not change with time.
A model can have several steady-state operating points. For example, a hanging damped pendulum has two steady-state operating points at which the pendulum position does not change with time. A stable steady-state operating point occurs when a pendulum hangs straight down. When the pendulum position deviates slightly, the pendulum always returns to equilibrium. In other words, small changes in the operating point do not cause the system to leave the region of good approximation around the equilibrium value.
When using optimization search to compute operating points for nonlinear systems, your initial guesses for the states and input levels must be near the desired operating point to ensure convergence.
When linearizing a model with multiple steady-state operating points, it is important to have the right operating point. For example, linearizing a pendulum model around the stable steady-state operating point produces a stable linear model, whereas linearizing around the unstable steady-state operating point produces an unstable linear model.
For more information on operating points, see What Is an Operating Point? (Simulink Control Design) and What Is a Steady-State Operating Point? (Simulink Control Design).
Setting Up a Steady-State Operating Point
This topic shows how to setup a steady-state operating point in Response Optimizer. To improve the fit between the model and measured data, the model must be set to steady-state before optimization.
Open the Response Optimizer and specify your requirements using the steps outlined in Design Optimization to Meet Frequency-Domain Requirements (GUI).
In the toolstrip, click Options and select
Operating Point Optionsfrom the drop down menu.
The following Operating Point dialog box opens.

The Optimize at steady-state option is checked by default when you open the operating point dialog. Use the States, Inputs and Outputs tabs to specify the known parameters, bounds and deviations. For instance, there is one state in the above figure. Use the operating point dialog box to specify that this state should be treated as an unknown, and it should be set to steady state. During response optimization, the operating point computation will vary this state to set it at steady-state.
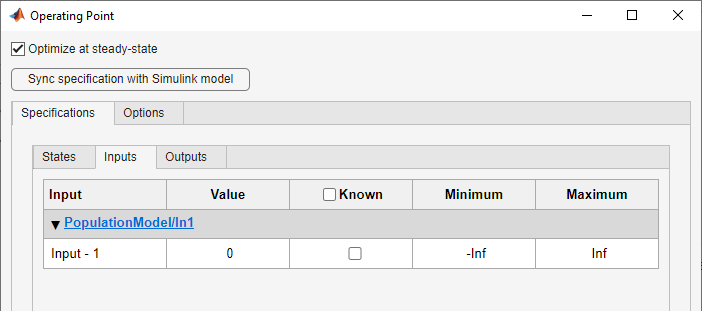
You can also sync operating point specifications from your Simulink® model using the
 button.
button.The Simulink Design Optimization™ software uses optimization methods to search for operating points in a model. Use the Options tab of the dialog box to specify these optimization methods. These options specify the optimization algorithm, tolerances, and stopping conditions. For instance, the option
Gradient descent with projectionis often used to find the operating point for systems that use physical modeling. For more information, click on the button.
button.
Having specified the operating point parameters, continue with the optimization workflow as described in Design Optimization to Meet Frequency-Domain Requirements (GUI).
See Also
Topics
- What Is an Operating Point? (Simulink Control Design)
- What Is a Steady-State Operating Point? (Simulink Control Design)
- Set Model to Steady-State When Estimating Parameters (GUI)
- Set Model to Steady-State When Estimating Parameters (Code)