Video Player is loading.
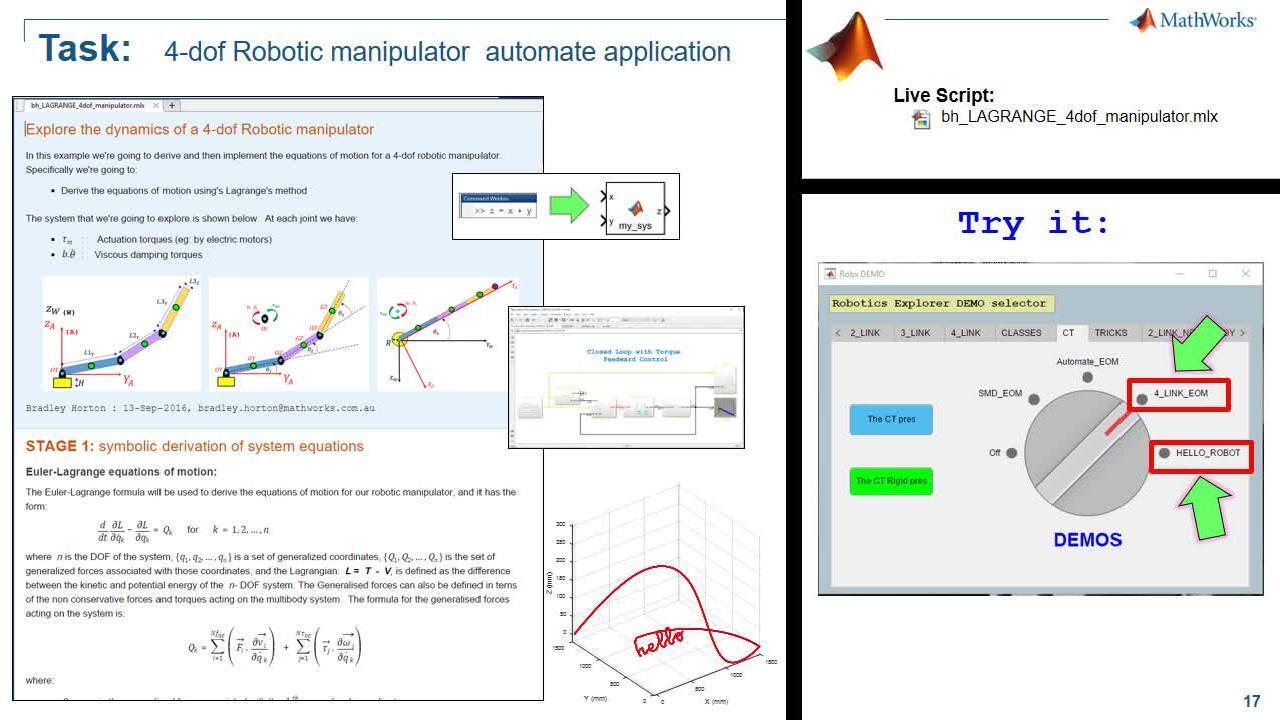
Four-Degrees-of-Freedom Non-Planar Robotic Manipulator Case Study | Teaching Rigid Body Dynamics, Part 5
From the series: Teaching Rigid Body Dynamics
In this final case study, you learn how to derive the equations of motion for a four-degrees-of-freedom non-planar robotic manipulator. The derived equations of motion are then used to make the robot write the word "HELLO".
Published: 30 Oct 2017










Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: United States.
También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)