Sistema de control con componentes ajustables
Este ejemplo muestra cómo crear un modelo ajustable del sistema de control en la siguiente ilustración.
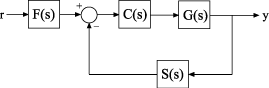
La respuesta de la planta es . El modelo de la dinámica de los sensores es . El controlador es un controlador PID ajustable y el prefiltro es un filtro paso bajo con un parámetro ajustable, .
Cree modelos que representen la dinámica de la planta y de los sensores. Dado que la dinámica de la planta y de los sensores es fija, deberá representarla mediante los modelos LTI numéricos zpk y tf.
G = zpk([],[-1,-1],1); S = tf(5,[1 4]);
Cree una representación ajustable del controlador .
C = tunablePID('C','PID');
C es un objeto tunablePID, que es un bloque Control Design con una estructura proporcional, integral y derivativa (PID) predefinida.
Cree un modelo del filtro con un parámetro ajustable.
a = realp('a',10);
F = tf(a,[1 a]);a es un objeto realp (parámetro real ajustable) con un valor inicial de 10. Cuando se utiliza a como coeficiente en tf, se crea el objeto de modelo genss ajustable F.
Conecte los modelos para construir un modelo de la respuesta en lazo cerrado de a .
T = feedback(G*C,S)*F
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 5 states, and the following blocks: C: Tunable PID controller, 1 occurrences. a: Scalar parameter, 2 occurrences. Model Properties Type "ss(T)" to see the current value and "T.Blocks" to interact with the blocks.
T es un objeto de modelo genss. En contraste con un modelo agregativo formado conectando solo modelos LTI numéricos, T realiza un seguimiento de los elementos ajustables del sistema de control. Los elementos ajustables se almacenan en la propiedad Blocks del objeto de modelo genss.
Muestre los elementos ajustables de T.
T.Blocks
ans = struct with fields:
C: [1×1 tunablePID]
a: [1×1 realp]
Puede usar comandos de ajuste como systune para ajustar los parámetros libres de T a fin de que cumplan los requisitos de diseño especificados.