Convert Nonlinear Constraints Between surrogateopt Form and Other
Solver Forms
Why Convert Constraint Forms?
To try various solvers including surrogateopt on a problem that has
nonlinear inequality constraints, you must convert between the form required by
surrogateopt and the form required by other solvers.
Convert from surrogateopt Structure Form to Other Solvers
The objective function objconstr(x) for
surrogateopt returns a structure. The Fval field
contains the objective function value, a scalar. The Ineq field contains
a vector of constraint function values. The solver attempts to make all values in the
Ineq field be less than or equal to zero. Positive values indicate a
constraint violation.
Other solvers expect the objective function to return a scalar value, not a structure.
Other solvers also expect the nonlinear constraint function to return two outputs,
ineqnonlin(x) and eqnonlin(x), not a structure
containing Ineq(x).
To convert the surrogateopt function
objconstr(x) for use in other solvers:
Set the objective function to
@(x)objconstr(x).Fval.Set the nonlinear constraint function to
@(x)deal(objconstr(x).Ineq,[]).
For example,
function ff = objconstr(x) ff.Fval = norm(x)^2; ff.Ineq = norm(x - [5,8])^2 - 25; end
To solve a constrained minimization problem using objconstr, call
surrogateopt.
lb = [-10,-20]; ub = [20,10]; sol = surrogateopt(@objconstr,lb,ub)
surrogateopt stopped because it exceeded the function evaluation limit set by
'options.MaxFunctionEvaluations'.
sol =
2.3504 3.7598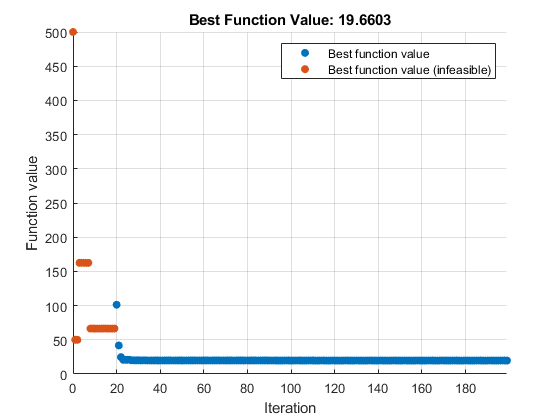
To solve the same problem using fmincon, split the objective and
constraint into separate functions. Include the nonlinear equality constraint as
[] by using the deal function.
objfcn = @(x)objconstr(x).Fval; nlcon = @(x)deal(objconstr(x).Ineq,[]);
Call fmincon with the objective function objfcn
and nonlinear constraint function nlcon.
[solf,fvalf,eflag,output] = ...
fmincon(objfcn,[0,0],[],[],[],[],lb,ub,nlcon)
Local minimum found that satisfies the constraints.
Optimization completed because the objective function is non-decreasing in
feasible directions, to within the value of the optimality tolerance,
and constraints are satisfied to within the value of the constraint tolerance.
solf =
2.3500 3.7600
fvalf =
19.6602
eflag =
1
output =
struct with fields:
iterations: 7
funcCount: 24
constrviolation: 0
stepsize: 2.0397e-05
algorithm: 'interior-point'
firstorderopt: 4.8151e-06
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.↵↵Optimization completed because the objective function is non-decreasing in ↵feasible directions, to within the value of the optimality tolerance,↵and constraints are satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The relative first-order optimality measure, 6.403047e-07,↵is less than options.OptimalityTolerance = 1.000000e-06, and the relative maximum constraint↵violation, 0.000000e+00, is less than options.ConstraintTolerance = 1.000000e-06.'
bestfeasible: [1×1 struct]You can also use patternsearch or ga to solve
the problem using the same conversion.
Convert from Other Solvers to surrogateopt Structure Form
If you have a problem written in the form for other solvers, use the packfcn function to
convert the objective and nonlinear constraints to the structure form for
surrogateopt. If the objective function is a function handle
@obj and the nonlinear constraint function is
@nlconst, then use the objective function objconstr
for surrogateopt.
objconstr = packfcn(@obj,@nlconst);
In this example, the objective function is Rosenbrock's function.
ros = @(x)100*(x(2) - x(1)^2)^2 + (1 - x(1))^2;
Specify the constraint function to restrict the solution to lie inside a disk of radius 1/3 centered at the point [1/3,1/3].
function [ineqnonlin,eqnonlin] = circlecon(x)
ineqnonlin = (x(1)-1/3)^2 + (x(2)-1/3)^2 - (1/3)^2;
eqnonlin = [];Set bounds of –2 and 2 on each component.
lb = [-2,-2]; ub = [2,2];
Solve the problem using patternsearch starting from [0,0].
x0 = [0,0]; x = patternsearch(ros,x0,[],[],[],[],lb,ub,@circlecon)
Optimization finished: mesh size less than options.MeshTolerance
and constraint violation is less than options.ConstraintTolerance.
x =
0.6523 0.4258Convert the problem for solution by surrogateopt.
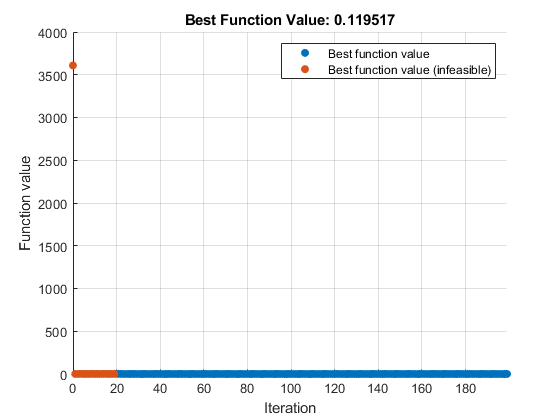
objconstr = packfcn(ros,@circlecon); xs = surrogateopt(objconstr,lb,ub)
surrogateopt stopped because it exceeded the function evaluation limit set by
'options.MaxFunctionEvaluations'.
xs =
0.6543 0.4286