How GlobalSearch and MultiStart Work
Multiple Runs of a Local Solver
GlobalSearch and MultiStart have
similar approaches to finding global or multiple minima. Both algorithms
start a local solver (such as fmincon) from multiple
start points. The algorithms use multiple start points to sample multiple
basins of attraction. For more information, see Basins of Attraction.
Differences Between the Solver Objects
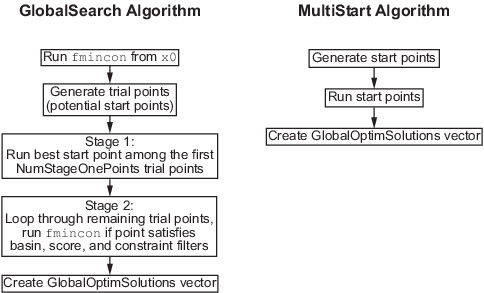
GlobalSearch and MultiStart Algorithm Overview contains a
sketch of the GlobalSearch and MultiStart algorithms.
GlobalSearch and MultiStart Algorithm Overview
The main differences between GlobalSearch and MultiStart are:
GlobalSearchuses a scatter-search mechanism for generating start points.MultiStartuses uniformly distributed start points within bounds, or user-supplied start points.GlobalSearchanalyzes start points and rejects those points that are unlikely to improve the best local minimum found so far.MultiStartruns all start points (or, optionally, all start points that are feasible with respect to bounds or inequality constraints).MultiStartgives a choice of local solver:fmincon,fminunc,lsqcurvefit, orlsqnonlin. TheGlobalSearchalgorithm usesfmincon.MultiStartcan run in parallel, distributing start points to multiple processors for local solution. To runMultiStartin parallel, see How to Use Parallel Processing in Global Optimization Toolbox.
Deciding Which Solver to Use
The differences between these solver objects boil down to the following decision on which to use:
Use
GlobalSearchto find a single global minimum most efficiently on a single processor.Use
MultiStartto:Find multiple local minima.
Run in parallel.
Use a solver other than
fmincon.Search thoroughly for a global minimum.
Explore your own start points.
GlobalSearch Algorithm
For a description of the algorithm, see Ugray et al. [1].
When you run a GlobalSearch object,
the algorithm performs the following steps:
Run fmincon from x0
GlobalSearch runs fmincon from
the start point you give in the problem structure.
If this run converges, GlobalSearch records the start
point and end point for an initial estimate on the radius of a basin
of attraction. Furthermore, GlobalSearch records
the final objective function value for use in the score function
(see Obtain Stage 1 Start Point, Run).
The score function is the sum of the objective function value
at a point and a multiple of the sum of the constraint violations.
So a feasible point has score equal to its objective function value.
The multiple for constraint violations is initially 1000. GlobalSearch updates
the multiple during the run.
Generate Trial Points
GlobalSearch uses the scatter search algorithm
to generate a set of NumTrialPoints trial points.
Trial points are potential start points. For a description of the
scatter search algorithm, see Glover [2]. GlobalSearch generates
trial points within any finite bounds you set (lb and ub).
Unbounded components have artificial bounds imposed: lb =
-1e4 + 1, ub
= 1e4 + 1. This range
is not symmetric about the origin so that the origin is not in the
scatter search. Components with one-sided bounds have artificial bounds
imposed on the unbounded side, shifted by the finite bounds to keep lb < ub.
Obtain Stage 1 Start Point, Run
GlobalSearch evaluates the score function of
a set of NumStageOnePoints trial points. It then
takes the point with the best score and runs fmincon from
that point. GlobalSearch removes the set of NumStageOnePoints trial
points from its list of points to examine.
Initialize Basins, Counters, Threshold
The localSolverThreshold is initially the
smaller of the two objective function values at the solution points.
The solution points are the fmincon solutions
starting from x0 and from the Stage 1 start point.
If both of these solution points do not exist or are infeasible, localSolverThreshold is
initially the penalty function value of the Stage 1 start point.
The GlobalSearch heuristic assumption is that
basins of attraction are spherical. The initial estimate of basins
of attraction for the solution point from x0 and
the solution point from Stage 1 are spheres centered at the solution
points. The radius of each sphere is the distance from the initial
point to the solution point. These estimated basins can overlap.
There are two sets of counters associated with the algorithm. Each counter is the number of consecutive trial points that:
Lie within a basin of attraction. There is one counter for each basin.
Have score function greater than
localSolverThreshold. For a definition of the score, see Run fmincon from x0.
All counters are initially 0.
Begin Main Loop
GlobalSearch repeatedly examines a remaining
trial point from the list, and performs the following steps. It continually
monitors the time, and stops the search if elapsed time exceeds MaxTime seconds.
Examine Stage 2 Trial Point to See if fmincon Runs
Call the trial point p. Run fmincon from p if
the following conditions hold:
pis not in any existing basin. The criterion for every basiniis:|p - center(i)| > DistanceThresholdFactor * radius(i).
DistanceThresholdFactoris an option (default value0.75).radiusis an estimated radius that updates in Update Basin Radius and Threshold and React to Large Counter Values.score(
p) <localSolverThreshold.(optional)
psatisfies bound and/or inequality constraints. This test occurs if you set theStartPointsToRunproperty of theGlobalSearchobject to"bounds"or"bounds-ineqs".
When fmincon Runs
Reset Counters
Set the counters for basins and threshold to 0.
Update Solution Set
If
fminconruns starting fromp, it can yield a positive exit flag, which indicates convergence. In that case,GlobalSearchupdates the vector ofGlobalOptimSolutionobjects. Call the solution pointxpand the objective function valuefp. There are two cases:For every other solution point
xqwith objective function valuefq,|xq - xp| > XTolerance * max(1,|xp|)or
|fq - fp| > FunctionTolerance * max(1,|fp|).In this case,
GlobalSearchcreates a new element in the vector ofGlobalOptimSolutionobjects. For details of the information contained in each object, seeGlobalOptimSolution.For some other solution point
xqwith objective function valuefq,|xq - xp| <= XTolerance * max(1,|xp|)and
|fq - fp| <= FunctionTolerance * max(1,|fp|).In this case,
GlobalSearchregardsxpas equivalent toxq. TheGlobalSearchalgorithm modifies theGlobalOptimSolutionofxqby addingpto the cell array ofX0points.There is one minor tweak that can happen to this update. If the exit flag for
xqis greater than1, and the exit flag forxpis1, thenxpreplacesxq. This replacement can lead to some points in the same basin being more than a distance ofXTolerancefromxp.
Update Basin Radius and Threshold
If the exit flag of the current
fminconrun is positive:Set threshold to the score value at start point
p.Set basin radius for
xpequal to the maximum of the existing radius (if any) and the distance betweenpandxp.
Report to Iterative Display
When the
GlobalSearchDisplayproperty is"iter", every point thatfminconruns creates one line in theGlobalSearchiterative display.
When fmincon Does Not Run
Update Counters
Increment the counter for every basin containing
p. Reset the counter of every other basin to0.Increment the threshold counter if score(
p) >=localSolverThreshold. Otherwise, reset the counter to0.React to Large Counter Values
For each basin with counter equal to
MaxWaitCycle, multiply the basin radius by1–BasinRadiusFactor. Reset the counter to0. (BothMaxWaitCycleandBasinRadiusFactorare settable properties of theGlobalSearchobject.)If the threshold counter equals
MaxWaitCycle, increase the threshold:new threshold = threshold +
PenaltyThresholdFactor*(1+ abs(threshold)).Reset the counter to
0.Report to Iterative Display
Every 200th trial point creates one line in the
GlobalSearchiterative display.
Create GlobalOptimSolution
After reaching MaxTime seconds or running out of trial points, GlobalSearch creates a vector of GlobalOptimSolution objects. (These points
correspond to positive fmincon exit flags.) GlobalSearch orders the vector by objective
function value, from lowest (best) to highest (worst). This concludes the
algorithm.
MultiStart Algorithm
When you run a MultiStart object,
the algorithm performs the following steps:
Validate Inputs
MultiStart checks input arguments for
validity. Checks include running the local solver once on problem inputs. Even
when run in parallel, MultiStart performs
these checks serially.
Generate Start Points
If you call MultiStart with the syntax
[x,fval] = run(ms,problem,k)
for an integer k, MultiStart generates k - 1 start points exactly as
if you used a RandomStartPointSet object. The algorithm
also uses the x0 start point from the problem structure,
for a total of k start points.
A RandomStartPointSet object does not have any points stored
inside the object. Instead, MultiStart calls
list,
which generates random points within the bounds given by the
problem structure. If an unbounded component exists,
list uses an artificial bound given by the
ArtificialBound property of the RandomStartPointSet object.
If you provide a CustomStartPointSet object, MultiStart does
not generate start points, but uses the points in the object.
Filter Start Points (Optional)
If you set the StartPointsToRun property of the MultiStart object to "bounds" or
"bounds-ineqs", MultiStart does not run the local solver from infeasible start
points. In this context, “infeasible” means start points that do
not satisfy bounds, or start points that do not satisfy both bounds and
inequality constraints.
The default setting of StartPointsToRun is "all". In
this case, MultiStart does not discard
infeasible start points.
Run Local Solver
MultiStart runs the local solver specified
in problem.solver, starting at the points that
pass the StartPointsToRun filter. If MultiStart is
running in parallel, it sends start points to worker processors one
at a time, and the worker processors run the local solver.
At each of its iterations, the local solver checks whether MaxTime seconds
have elapsed since MultiStart began
calculating. If so, MultiStart exits that
iteration without reporting a solution.
When the local solver stops, MultiStart stores the results
that correspond to positive local solver exit flags and continues to the next
step.
Report to Iterative Display. When the MultiStart
Display property is "iter", every
point that the local solver runs creates one line in the MultiStart iterative display.
Check Stopping Conditions
MultiStart stops when it runs out of start
points. It also stops when it exceeds a total run time of MaxTime seconds.
Create GlobalOptimSolution Object
After MultiStart reaches a stopping condition, the algorithm
creates a vector of GlobalOptimSolution
objects (all of which correspond to positive local solver exit flags) as
follows:
Sort the local solutions by objective function value (
Fval) from lowest to highest. For thelsqnonlinandlsqcurvefitlocal solvers, the objective function is the norm of the residual.Loop over the local solutions
jbeginning with the lowest (best)Fval.Find all the solutions
ksatisfying both:|Fval(k) - Fval(j)| <= FunctionTolerance*max(1,|Fval(j)|)|x(k) - x(j)| <= XTolerance*max(1,|x(j)|)Record
j,Fval(j), the local solveroutputstructure forj, and a cell array of the start points forjand all thek. Remove those pointskfrom the list of local solutions. This point is one entry in the vector ofGlobalOptimSolutionobjects.
The resulting vector of GlobalOptimSolution objects
is in order by Fval, from lowest (best) to highest
(worst).
Report to Iterative Display. After examining all the local solutions, MultiStart gives
a summary to the iterative display. This summary includes the number
of local solver runs that converged, the number that failed to converge,
and the number that had errors.
Bibliography
[1] Ugray, Zsolt, Leon Lasdon, John C. Plummer, Fred Glover, James Kelly, and Rafael Martí. Scatter Search and Local NLP Solvers: A Multistart Framework for Global Optimization. INFORMS Journal on Computing, Vol. 19, No. 3, 2007, pp. 328–340.
[2] Glover, F. “A template for scatter search and path relinking.” Artificial Evolution (J.-K. Hao, E.Lutton, E.Ronald, M.Schoenauer, D.Snyers, eds.). Lecture Notes in Computer Science, 1363, Springer, Berlin/Heidelberg, 1998, pp. 13–54.
[3] Dixon, L. and G. P. Szegö. “The Global Optimization Problem: an Introduction.” Towards Global Optimisation 2 (Dixon, L. C. W. and G. P. Szegö, eds.). Amsterdam, The Netherlands: North Holland, 1978.