Cylinder Friction
(To be removed) Friction in hydraulic cylinders
The Hydraulics (Isothermal) library will be removed in a future release. Use the Isothermal Liquid library instead.
For more information on updating your models, see Upgrading Hydraulic Models to Use Isothermal Liquid Blocks.
Libraries:
Simscape /
Fluids /
Hydraulics (Isothermal) /
Hydraulic Cylinders
Description
The Cylinder Friction block simulates friction in the contact between moving bodies in hydraulic cylinders. Use this block as a building block in combination with double- and single-acting cylinders to develop a cylinder model with friction. The block simulates the friction force as a function of relative velocity and pressure, and assumes this force is the sum of the Stribeck, Coulomb, and viscous components. The Coulomb friction force consists of the preload force, which is caused by the seal squeeze during assembly, and the force proportional to the pressure. The sum of the Coulomb and Stribeck friction forces at zero velocity is the breakaway friction force. For more information, see the Translational Friction block reference page.
The block approximates the friction force as
where:
| F | Friction force |
| FC | Coulomb friction |
| Fpr | Preload force |
| fcfr | Coulomb friction coefficient |
| pA, pB | Pressures in cylinder chambers |
| Kbrk | Breakaway friction force increase coefficient |
| cv | Transition coefficient |
| v | Relative velocity in the contact |
| fvfr | Viscous friction coefficient |
To avoid discontinuity at v = 0, the block introduces a small region, |v| ≤ vth, around zero velocity where the friction force is linearly proportional to velocity
where:
| K | Proportionality coefficient |
| vth | Velocity threshold |
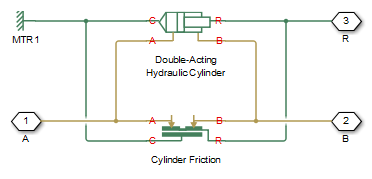
R and C are mechanical translational conserving ports associated with the rod and case, respectively. A and B are hydraulic conserving ports that you connect to ports A and B of the cylinder block, as shown in this illustration. The force generated by the block always opposes relative motion between the rod and the case.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.