mapprofile
Interpolate between waypoints on terrain
Syntax
Description
Use Unit Sphere and Get Range in Degrees
[
interpolates intermediate points between the waypoints specified by
zq,distq,latq,lonq] = mapprofile(Z,R,lat,lon)lat and lon. Specify the terrain using the
elevation data Z and raster reference R. For
each intermediate point, the function returns the interpolated terrain height in
zq, the distance from the first waypoint (the
range) in distq, the latitude in
latq, and the longitude in lonq.
Specify Range Units
Specify Reference Ellipsoid
Display and Interactively Select Coordinates
mapprofile(___) displays an elevation profile of the
intermediate points in a new figure on an axesm-based map.
[___] = mapprofile enables you to interactively
select waypoints on the current axesm-based map. If the current object
on the map is a regular data grid, then the function uses the
z-coordinate data (the ZData property) as the
terrain elevation data. Otherwise, the function uses z-coordinate data
from the first regular data grid it finds on the map. If the grid does not have
z-coordinate data, then the function uses the color data (the
CData property), instead. To finish selecting points, press
Enter.
Examples
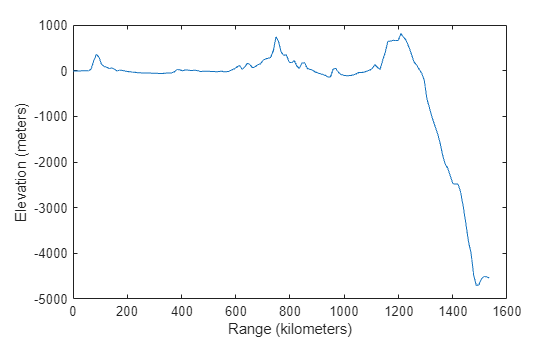
Load elevation data and a geographic cells reference object for the Korean peninsula. Compute the elevation profile between two points in the region, specifying the units for the range (distq) as kilometers. By default, the mapprofile function uses bilinear interpolation along a great circle track.
load korea5c lat = [40.5 30.7]; lon = [121.5 133.5]; [zq,distq,latq,lonq] = mapprofile(korea5c,korea5cR,lat,lon,"km");
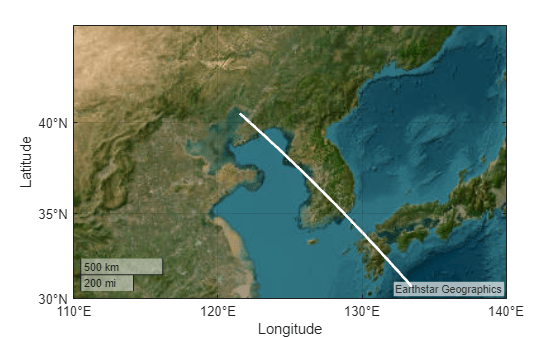
Plot the track over a satellite basemap.
figure geolimits(korea5cR.LatitudeLimits,korea5cR.LongitudeLimits) hold on geoplot(latq,lonq,"w",LineWidth=2) geobasemap satellite
Display the elevation profile on a Cartesian plot.
figure plot(distq,zq) xlabel("Range (kilometers)") ylabel("Elevation (meters)")
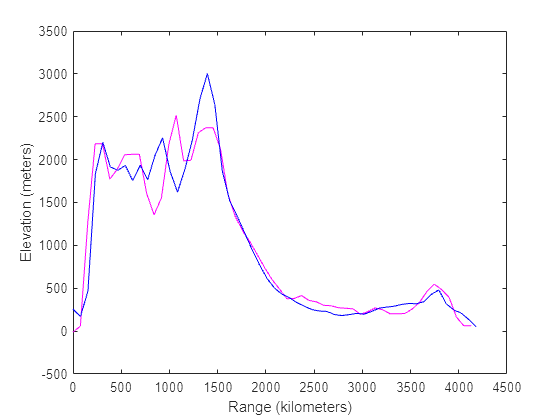
Load world topography data into the workspace as an array and a geographic raster reference object. Calculate an elevation profile for the great circle track between San Francisco and New York City, using nearest neighbor interpolation.
load topo60c lat = [37.77 40.71]; lon = [-122.41 -74.01]; [zqgc,distqgc,latqgc,lonqgc] = mapprofile(topo60c,topo60cR,lat,lon,"km","gc","nearest");
Calculate an elevation profile for the rhumb line track between the same cities, using bicubic interpolation.
[zqrh,distqrh,latqrh,lonqrh] = mapprofile(topo60c,topo60cR,lat,lon,"km","rh","bicubic");
Display both tracks on a map. Use magenta for the great circle track and blue for the rhumb line track.
figure geoplot(latqgc,lonqgc,"m",LineWidth=1.5) hold on geoplot(latqrh,lonqrh,"b",LineWidth=1.5) geobasemap topographic

Display both elevation profiles on a Cartesian plot.
figure plot(distqgc,zqgc,"m") hold on plot(distqrh,zqrh,"b") xlabel("Range (kilometers)") ylabel("Elevation (meters)")
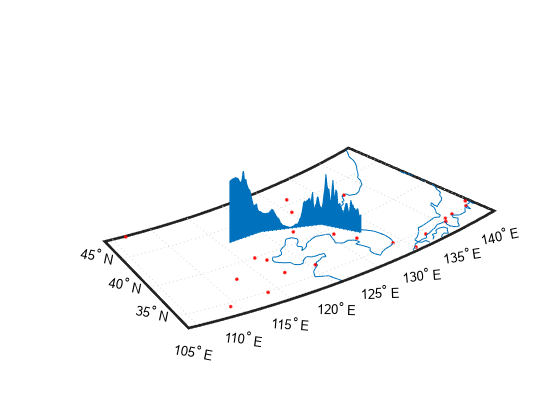
Load terrain elevation data for the Korean peninsula into the workspace as an array and a geographic cells reference object. Specify the coordinates of four waypoints.
load korea5c
lat = [43 43 41 38];
lon = [116 120 126 128];Display the elevation profile on a map by omitting the output arguments. When you specify more than two waypoints, the function displays the result in 3-D.
mapprofile(korea5c,korea5cR,lat,lon)
Add coastlines and city locations to the map.
load coastlines plotm(coastlat,coastlon) geoshow("worldcities.shp",Marker=".",Color="r")