quad2d
Numerically evaluate double integral — tiled method
Description
Examples
Integrate
over and .
fun = @(x,y) y.*sin(x)+x.*cos(y); Q = quad2d(fun,pi,2*pi,0,pi)
Q = -9.8696
Compare the result to the true value of the integral, .
-pi^2
ans = -9.8696
Integrate the function
over the region and . This integrand is infinite at the origin (0,0), which lies on the boundary of the integration region.
fun = @(x,y) 1./(sqrt(x + y) .* (1 + x + y).^2 ); ymax = @(x) 1 - x; Q = quad2d(fun,0,1,0,ymax)
Q = 0.2854
The true value of the integral is .
pi/4 - 0.5
ans = 0.2854
quad2d begins by mapping the region of integration to a rectangle. Consequently, it may have trouble integrating over a region that does not have four sides or has a side that cannot be mapped smoothly to a straight line. If the integration is unsuccessful, some helpful tactics are leaving Singular set to its default value of true, changing between Cartesian and polar coordinates, or breaking the region of integration into pieces and adding the results of integration over the pieces.
For instance:
fun = @(x,y)abs(x.^2 + y.^2 - 0.25); c = @(x)-sqrt(1 - x.^2); d = @(x)sqrt(1 - x.^2); quad2d(fun,-1,1,c,d,'AbsTol',1e-8,... 'FailurePlot',true,'Singular',false);
Warning: Reached the maximum number of function evaluations (2000). The result fails the global error test.
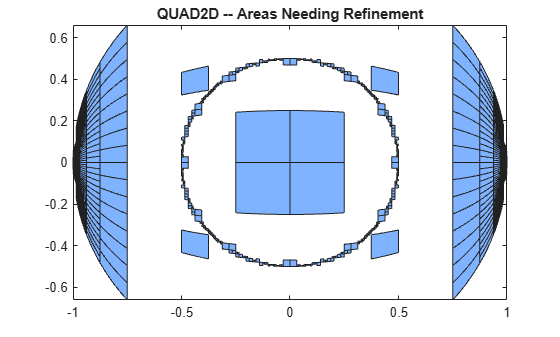
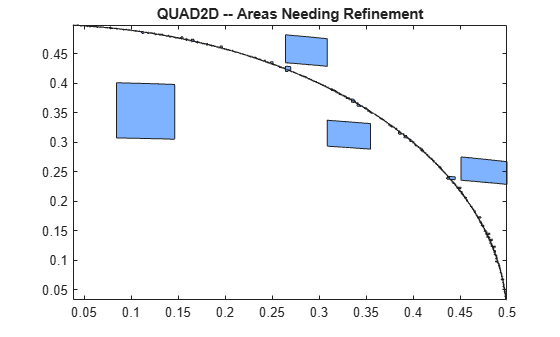
The failure plot shows two areas of difficulty, near the points (-1,0) and (1,0) and near the circle .
Changing the value of Singular to true will cope with the geometric singularities at (-1,0) and (1,0). The larger shaded areas may need refinement but are probably not areas of difficulty.
Q = quad2d(fun,-1,1,c,d,'AbsTol',1e-8, ... 'FailurePlot',true,'Singular',true);
Warning: Reached the maximum number of function evaluations (2000). The result passes the global error test.

From here you can take advantage of symmetry:
Q = 4*quad2d(fun,0,1,0,d,'Abstol',1e-8,... 'Singular',true,'FailurePlot',true)
Q = 0.9817
However, the code is still working very hard near the singularity. It may not be able to provide higher accuracy:
Q = 4*quad2d(fun,0,1,0,d,'Abstol',1e-10,... 'Singular',true,'FailurePlot',true);
Warning: Reached the maximum number of function evaluations (2000). The result passes the global error test.
At higher accuracy, a change in coordinates may work better.
polarfun = @(theta,r) fun(r.*cos(theta),r.*sin(theta)).*r;
Q = 4*quad2d(polarfun,0,pi/2,0,1,'AbsTol',1e-10);It is best to put the singularity on the boundary by splitting the region of integration into two parts:
Q1 = 4*quad2d(polarfun,0,pi/2,0,0.5,'AbsTol',5e-11); Q2 = 4*quad2d(polarfun,0,pi/2,0.5,1,'AbsTol',5e-11); Q = Q1 + Q2;
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] L.F. Shampine, "MATLAB Program for Quadrature in 2D." Applied Mathematics and Computation. Vol. 202, Issue 1, 2008, pp. 266–274.
Extended Capabilities
Version History
Introduced in R2009a