Genere código para la planificación de rutas utilizando Hybrid A Star
Este ejemplo muestra cómo realizar la generación de código para planificar una ruta libre de colisiones para un vehículo a través de un mapa utilizando el algoritmo Hybrid A*. Después de verificar el algoritmo en MATLAB ®, utilice la función codegen (MATLAB Coder) para generar una función MEX. Utilice el archivo MEX generado en el algoritmo para visualizar la ruta planificada.
Escribir algoritmo para planificar la ruta
Crea una función, codegenPathPlanner, que utiliza un objeto plannerHybridAStar para planificar una ruta desde la pose inicial hasta la pose objetivo en el mapa.
function path = codegenPathPlanner(mapData,startPose,goalPose) %#codegen % Create a binary occupancy map map = binaryOccupancyMap(mapData); % Create a state space object stateSpace = stateSpaceSE2; % Update state space bounds to be the same as map limits. stateSpace.StateBounds = [map.XWorldLimits;map.YWorldLimits;[-pi pi]]; % Construct a state validator object using the statespace and map object validator = validatorOccupancyMap(stateSpace,Map=map); % Set the validation distance for the validator validator.ValidationDistance = 0.01; % Assign the state validator object to the plannerHybridAStar object planner = plannerHybridAStar(validator); % Compute a path for the given start and goal poses pathObj = plan(planner,startPose,goalPose); % Extract the path poses from the path object path = pathObj.States; end
Esta función actúa como contenedor para una llamada de planificación de ruta híbrida A* estándar. Acepta entradas estándar y devuelve una ruta libre de colisiones como un arreglo. Como no puede utilizar un objeto de identificador como entrada o salida de una función compatible con la generación de código, cree el objeto planificador dentro de la función. Guarde la función codegenPathPlanner en su carpeta actual.
Verificar el algoritmo de planificación de rutas en MATLAB
Verifique el algoritmo de planificación de rutas en MATLAB antes de generar código.
Genere el mapa de un laberinto 2D aleatorio.
map = mapMaze(5,MapSize=[25 25],MapResolution=1); mapData = occupancyMatrix(map);
Define las posiciones inicial y final como vectores [x y theta]. x y y especifican la posición en metros, y theta especifica el ángulo de orientación en radianes.
startPose = [3 3 pi/2]; goalPose = [22 22 pi/2];
Planifique la ruta para la pose inicial, la pose objetivo y el mapa especificados.
path = codegenPathPlanner(mapData,startPose,goalPose);
Visualice la ruta calculada.
show(binaryOccupancyMap(mapData)) hold on % Start state scatter(startPose(1,1),startPose(1,2),"g","filled") % Goal state scatter(goalPose(1,1),goalPose(1,2),"r","filled") % Path plot(path(:,1),path(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MATLAB Generated Path") legend(Location="northwest")

Generar código para el algoritmo de planificación de rutas
Puede utilizar la función codegen (MATLAB Coder) o la app MATLAB Coder (MATLAB Coder) para generar código. Para este ejemplo, genere un archivo MEX llamando codegen en la línea de comandos de MATLAB. Especifique argumentos de entrada de muestra para cada entrada a la función utilizando la opción -args y el argumento de entrada func_inputs.
Llame a la función codegen y especifique los argumentos de entrada en un arreglo de celdas. Esta función crea una función codegenPathPlanner_mex separada para usar. También puede producir código C utilizando el argumento de entrada options. Este paso puede llevar algún tiempo.
codegen -config:mex codegenPathPlanner -args {mapData,startPose,goalPose}
Code generation successful.
Verificar resultados utilizando la función MEX generada
Planifique la ruta llamando a la versión MEX del algoritmo de planificación de ruta para la pose inicial, la pose objetivo y el mapa especificados.
mexPath = codegenPathPlanner_mex(mapData,startPose,goalPose);
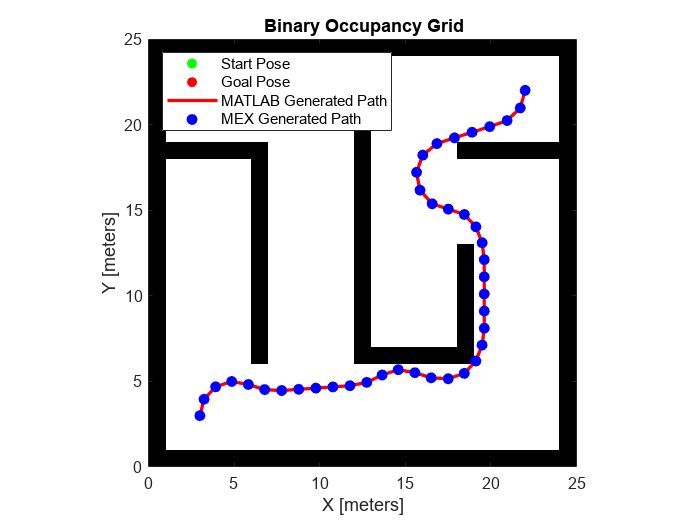
Visualice la ruta calculada por la versión MEX del algoritmo de planificación de ruta.
scatter(mexPath(:,1),mexPath(:,2),... Marker="o",... MarkerFaceColor="b",... MarkerEdgeColor="b") legend("Start Pose","Goal Pose","MATLAB Generated Path","MEX Generated Path") legend(Location="northwest") hold off
Verificar el rendimiento del código generado
Compare el tiempo de ejecución de la función MEX generada con el tiempo de ejecución de su función original utilizando timeit.
time = timeit(@() codegenPathPlanner(mapData,startPose,goalPose))
time = 0.3735
mexTime = timeit(@() codegenPathPlanner_mex(mapData,startPose,goalPose))
mexTime = 0.0474
time/mexTime
ans = 7.8872
En este ejemplo, la función MEX se ejecuta más de cinco veces más rápido. Los resultados pueden variar para su sistema.
Planificar ruta en un nuevo mapa usando la función MEX generada
Planifica una ruta para un nuevo comienzo y plantea objetivos en un nuevo mapa. El tamaño del nuevo mapa debe ser el mismo que el mapa utilizado para generar la función MEX.
Genere el mapa de un laberinto 2D aleatorio.
mapNew = mapMaze(5,MapSize=[25 25],MapResolution=1); mapDataNew = occupancyMatrix(mapNew);
Especifique las poses de inicio y objetivo.
startPoseNew = [22 3 pi/2]; goalPoseNew = [3 22 pi/2];
Planifique la ruta para la pose inicial, la pose objetivo y el mapa especificados.
pathNew = codegenPathPlanner_mex(mapDataNew,startPoseNew,goalPoseNew);
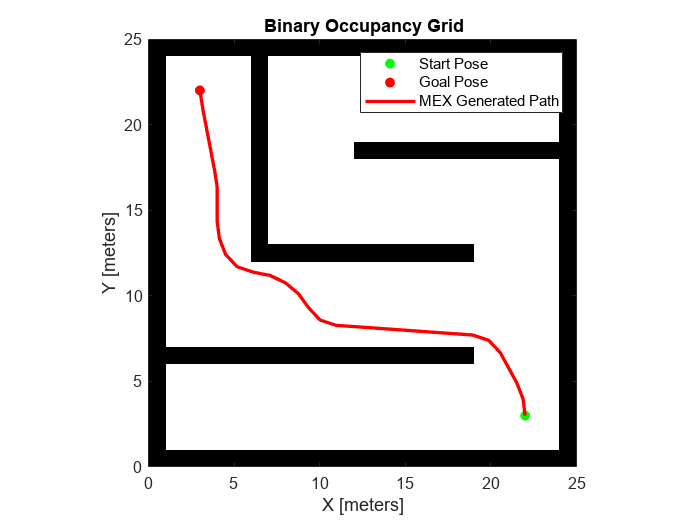
Visualice la nueva ruta calculada por la función MEX.
show(binaryOccupancyMap(mapDataNew)) hold on % Start state scatter(startPoseNew(1,1),startPoseNew(1,2),"g","filled") % Goal state scatter(goalPoseNew(1,1),goalPoseNew(1,2),"r","filled") % Path plot(pathNew(:,1),pathNew(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MEX Generated Path") legend(Location='northeast')