Rotational Damper
Amortiguador viscoso en sistemas mecánicos de rotación

Bibliotecas:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
Descripción
El bloque Rotational Damper representa un amortiguador viscoso mecánico de rotación ideal descrito con las siguientes ecuaciones:
donde
T es el par motor transmitido a través del amortiguador.
D es el coeficiente de amortiguación, definido por la fricción viscosa.
ω es la velocidad angular relativa.
ωR y ωC son las velocidades angulares absolutas de los puertos R y C, respectivamente.
La dirección positiva del bloque va del puerto R al puerto C. Esto significa que, si la velocidad del puerto R es mayor que la del puerto C, el bloque transmite el par motor de R a C.
Variables
Para establecer la prioridad y los valores objetivo iniciales para las variables del bloque antes de la simulación, utilice la sección Initial Targets en el cuadro de diálogo del bloque o de Property Inspector. Para obtener más información, consulte Establecer la prioridad y los valores objetivo iniciales para variables de bloque.
Los valores nominales ofrecen una forma de especificar la magnitud prevista de una variable en un modelo. Usar el escalado del sistema basado en valores nominales aumenta la solidez de la simulación. Los valores nominales pueden provenir de distintas fuentes, una de las cuales es la sección Nominal Values en el cuadro de diálogo del bloque o de Property Inspector. Para obtener más información, consulte Modify Nominal Values for a Block Variable.
Ejemplos

Sistema mecánico simple
En este ejemplo se muestra un modelo de un sistema que conecta el movimiento rotacional con el traslacional. Una palanca de suma dirige una carga que consiste en una masa, fricción viscosa y un resorte conectado a su junta C. La junta B está suspendida sobre dos resortes rotacionales conectados al punto de referencia por medio de una rueda y un eje, y una caja de cambios. La junta A está conectada a un par motor de partida por medio de una caja de cambios y un mecanismo con rueda y eje.
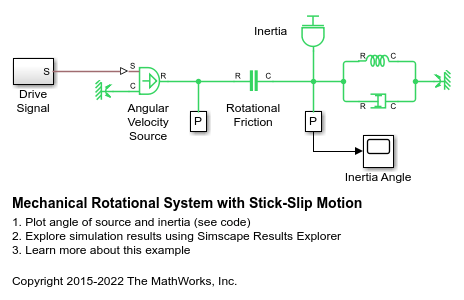
Sistema mecánico de rotación con oscilaciones con efecto stick-slip
Este modelo muestra un sistema mecánico de rotación con fricción por oscilaciones con efecto stick-slip. Se conecta una inercia a un punto fijo mediante el resorte y el amortiguador. La inercia se mueve por una fuente de velocidad a través de un elemento de fricción por oscilaciones con efecto stick-slip. El elemento de fricción presenta una diferencia entre la fricción de arranque y la de Coulomb, lo que provoca oscilaciones con efecto stick-slip de la inercia.
Puertos
Transferencia
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2007a
Consulte también
Rotational Friction | Rotational Hard Stop | Rotational Spring