Explorar la jerarquía de un modelo
Los modelos de Simulink® se pueden organizar en componentes jerárquicos. En un modelo jerárquico, puede elegir entre ver el sistema a un nivel alto o descender en la jerarquía del modelo para ver cada vez más niveles de detalle del modelo.
Ver la jerarquía de un modelo
Para empezar, abra el modelo smart_braking.
En el modelo:
Un automóvil se desplaza cuando se acciona el acelerador.
Un sensor de proximidad mide la distancia entre el vehículo y un obstáculo.
Un sistema de alerta genera una alarma basada en esta proximidad.
La alarma controla automáticamente el freno para evitar un choque.
Cuando se construye un modelo, se conectan bloques para modelar componentes complejos que representan la dinámica del sistema. En este modelo, el vehículo, el sensor de proximidad y el sistema de alerta son todos componentes complejos con múltiples bloques que existen en una jerarquía de subsistemas. Para ver los contenidos de un subsistema, haga doble clic en el subsistema.
Para ver una representación de la jerarquía completa del modelo, abra Model Browser.
Amplíe verticalmente la ventana del modelo hasta que se pueda ver el botón Hide/Show Model Browser en la esquina inferior izquierda de Simulink Editor.
Haga clic en el botón Hide/Show Model Browser.

Model Browser muestra que todos los subsistemas que ve en el nivel superior tienen subsistemas propios. Amplíe el nodo de cada subsistema para ver los subsistemas que contiene. Puede explorar la jerarquía en Model Browser. Por ejemplo, amplíe el nodo Proximity sensor y seleccione el subsistema Sensor model.

La barra de direcciones muestra qué subsistema está viendo. Para abrir el subsistema en una ventana aparte, haga clic con el botón secundario en el subsistema y, después, haga clic en el botón Open In New Window.
Todos los puertos de entrada o salida de un subsistema tienen un bloque Inport u Outport correspondiente dentro del subsistema. Estos bloques representan la transferencia de datos entre un subsistema y su sistema principal. Cuando un sistema contiene múltiples puertos de entrada o salida, el número en los bloques Inport u Outport indica la posición del puerto en la interfaz del subsistema.
Ver atributos de señales
Las líneas de conexión en Simulink indican la transferencia de datos de bloque a bloque. Las señales tienen propiedades que se corresponden con su función en el modelo:
Dimensiones: escalar, vector o matriz
Tipo de datos: cadena, doble, entero sin signo, etc.
Tiempo de muestreo: un intervalo de tiempo fijo en el que la señal presenta un valor actualizado (o
0en el caso de muestreo continuo)
Para mostrar el tipo de datos de todas las señales de un modelo, en la pestaña Debug, en Information Overlays, haga clic en Base Data Types.

El modelo muestra tipos de datos a lo largo de las líneas de conexión. La mayoría de las señales son dobles, excepto la salida del subsistema denominado Alert system. Haga doble clic en el subsistema para investigar.

Las etiquetas de tipo de datos en este subsistema muestran que el tipo de datos cambia en el subsistema denominado Alert device. Haga doble clic en el subsistema para investigar.

El componente del dispositivo de alerta convierte la señal Alert index de un doble a un entero. Puede establecer el tipo de datos en las fuentes o bien utilizar un bloque Data Type Conversion de la biblioteca Signal Atributes. El tipo de datos predeterminado, double, proporciona la mejor precisión numérica y admite todos los bloques. El tipo de datos doble también utiliza la mayor cantidad de memoria y poder de cálculo. Pueden utilizarse otros tipos de datos numéricos para modelar sistemas embebidos con memoria y potencia de computación limitadas.
Para mostrar los tiempos de muestreo, en la pestaña Debug, en Information Overlays, haga clic en Colors en la sección Sample Time. El modelo se actualiza para mostrar distintos colores para cada tiempo de muestreo en el modelo, junto con una leyenda.

Un bloque o señal con dinámica continua es negro. Las señales con tiempo de muestreo continuo se actualizan siempre que el solver lo necesite para satisfacer los valores de tolerancia especificados.
Un bloque o señal constante es magenta. Permanecen sin cambios a lo largo de la simulación.
Una señal o bloque discreto que se actualiza al intervalo fijo más bajo es rojo. Las señales con tiempo de muestreo discreto se actualizan a un intervalo fijo. Si el modelo contiene componentes con distintos tiempos de muestreo fijos, cada tiempo de muestreo discreto tiene un color distinto.
Los subsistemas multifrecuencia, que contienen una mezcla de señales discretas y continuas, son marrones.
Seguimiento de una señal
Este modelo tiene una entrada constante y una salida discreta. Para determinar dónde cambia el procedimiento de muestreo, realice un seguimiento de la señal de salida a través de sus bloques fuente.
Para abrir Model Browser, amplíe verticalmente la ventana del modelo hasta que se pueda ver el botón Hide/Show Model Browser
 en la esquina inferior izquierda de Simulink Editor. Después, haga clic en el botón.
en la esquina inferior izquierda de Simulink Editor. Después, haga clic en el botón.Para realizar un seguimiento de la fuente de la señal de salida, seleccione la línea de conexión conectada al puerto de salida del subsistema denominado
Alert System. Luego, en la pestaña Signal, haga clic en Trace to Source .
.Simulink Editor entra en el modo de seguimiento de señales. En el modo de seguimiento de señales, el área de diseño del modelo se pone gris en lugar de blanco para ayudar a resaltar la ruta seguida.
En la parte inferior derecha, el panel de sugerencias muestra los accesos directos para las acciones que puede realizar en el modo de seguimiento de señales. Para minimizar o restaurar el panel de sugerencias, presione ? en el teclado.

Para continuar con el seguimiento del origen de la señal de salida, presione la tecla de dirección izquierda. El software se desplaza dentro del subsistema denominado
Alert systemy resalta el siguiente bloque fuente que afecta al valor de la señal de salida.
Continúe presionando la tecla de dirección izquierda para seguir el origen de la señal de salida hasta que llegue al bloque Subtract dentro del subsistema denominado
Alert logic. Cuando llegue al bloque Subtract en la ruta de la señal, debe elegir una ruta para continuar el seguimiento, ya que el bloque Subtract tiene dos puertos de entrada. El software destaca el próximo segmento que se debe seguir en azul para indicar la ruta seleccionada. De forma predeterminada, se selecciona el primer puerto de entrada para continuar el seguimiento. Seleccione la ruta para el puerto de entrada negativo presionando la tecla de dirección hacia abajo.
Para hallar la fuente de la discretización, continúe presionando la flecha izquierda.
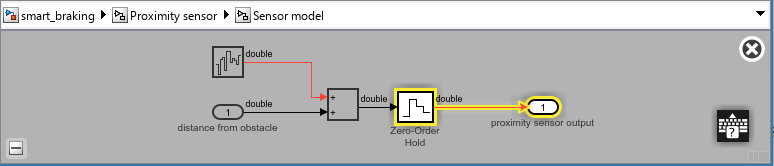
El bloque Zero-Order Hold en el subsistema del modelo Sensor convierte la señal de continua a discreta.