Modelar un sistema de frenado antibloqueo
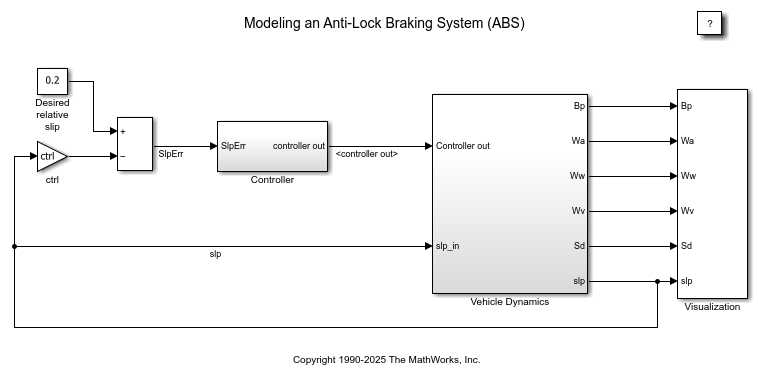
En este ejemplo se muestra cómo modelar un sistema de frenado antibloqueo (ABS) sencillo. El modelo simula el comportamiento dinámico de un vehículo en condiciones de frenado difíciles. El modelo representa una única rueda, que puede replicarse varias veces para crear un modelo para un vehículo de múltiples ruedas.
Este modelo utiliza la funcionalidad de registro de señales en Simulink®. El modelo registra señales en el área de trabajo de MATLAB®, donde puede verlas y analizarlas. Consulte el código del archivo ModelingAnAntiLockBrakingSystemExample.m para ver cómo el software registra las señales.
En el modelo sldemo_absbrake, la velocidad de la rueda se calcula en un modelo separado denominado sldemo_wheelspeed_absbrake. Después, se referencia este componente utilizando un bloque Model. Tanto el modelo superior como el modelo referenciado utilizan un solver de paso variable; por lo tanto, Simulink realiza un seguimiento de los cruces por cero en el modelo referenciado.
Física del modelo
La rueda gira con una velocidad angular inicial que corresponde a la velocidad del vehículo antes de accionar los frenos. El modelo utiliza integradores separados para calcular la velocidad angular de la rueda y la velocidad del vehículo. El modelo usa dos velocidades para calcular el deslizamiento, que está determinado por la ecuación 1. Tenga en cuenta que la velocidad del vehículo se expresa como velocidad angular.

Ecuación 1






El deslizamiento es cero cuando la velocidad de la rueda y la velocidad del vehículo son iguales, y el deslizamiento es igual a uno cuando la rueda está bloqueada. Un valor de deslizamiento deseable es 0.2, lo que indica que el número de revoluciones de la rueda es igual a 0.8 veces el número de revoluciones en condiciones sin frenado con la misma velocidad del vehículo. Este valor maximiza la adhesión entre el neumático y la carretera y minimiza la distancia de parada con la fricción disponible.
Análisis de modelos
El coeficiente de fricción entre el neumático y la superficie de la carretera, mu, es una función empírica del deslizamiento, conocida como curva mu-slip. El software crea curvas mu-slip pasando variables de MATLAB al diagrama de bloques mediante una tabla de búsqueda de Simulink. El modelo multiplica el coeficiente de fricción, mu, por el peso de la rueda, W, para generar la fuerza de fricción, Ff, que actúa sobre la circunferencia del neumático. Ff se divide por la masa del vehículo para generar la deceleración del vehículo, que el modelo integra para obtener la velocidad del vehículo.
El modelo utiliza un controlador de frenado antibloqueo ideal que utiliza un controlador de encendido/apagado basado en el error entre el deslizamiento real y el deslizamiento deseado. El deslizamiento deseado se establece en el valor del deslizamiento en el que la curva mu-slip alcanza su valor pico, que es el valor óptimo para la distancia mínima de frenado.
En un vehículo real, el deslizamiento no puede medirse directamente; por lo tanto, este algoritmo de control no resulta práctico. Este ejemplo utiliza el algoritmo para ilustrar la construcción conceptual de este modelo de simulación.
Haga doble clic en el subsistema Wheel Speed para abrirlo. Dado el deslizamiento de la rueda, el deslizamiento deseado de la rueda y el par motor del neumático, el subsistema calcula la velocidad angular de la rueda.
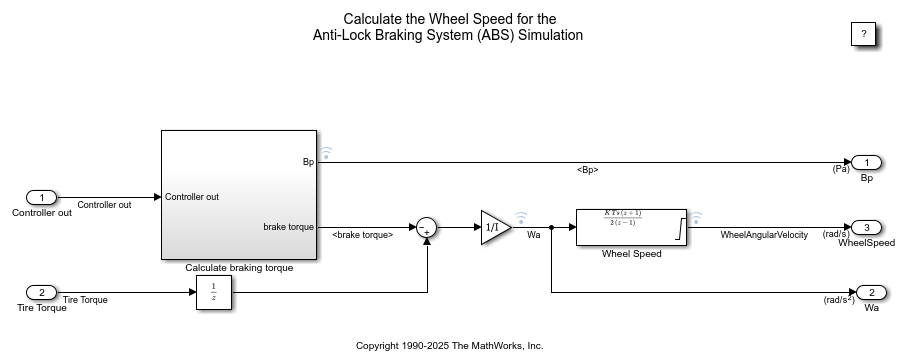
Para controlar la tasa de cambio de la presión de frenado, el modelo resta el deslizamiento real del deslizamiento deseado y alimenta esta señal a un controlador de encendido/apagado (+1 o -1, dependiendo del signo del error). Esta tasa de encendido/apagado pasa por un retardo de primer orden que representa el retraso asociado a las líneas hidráulicas del sistema de frenos. Después, el modelo integra la tasa filtrada para generar la presión de frenado real. La señal resultante multiplicada por el área del pistón y el radio con respecto a la rueda (Kf) es el par motor del freno aplicado a la rueda.
El modelo multiplica la fuerza de fricción sobre la rueda por el radio de la rueda (Rr) para obtener el par motor de aceleración de la superficie de la carretera sobre la rueda. El par motor del freno se resta para obtener el par motor neto sobre la rueda. Al dividir el par motor neto por la inercia rotacional de la rueda I se genera la aceleración de la rueda, que después se integra para obtener la velocidad de la rueda. Para que la velocidad de la rueda y la velocidad del vehículo sigan siendo positivas, el modelo utiliza integradores limitados.
Simular en modo ABS
En la pestaña Simulation, haga clic en Run para ejecutar la simulación. También puede ejecutar la simulación introduciendo el comando sim('sldemo_absbrake') en la ventana de comandos de MATLAB. El ABS está activado durante esta simulación.
El modelo registra los datos relevantes del área de trabajo de MATLAB en una estructura denominada sldemo_absbrake_output. Las señales registradas tienen un indicador azul. En este caso, yout y slp están registradas.
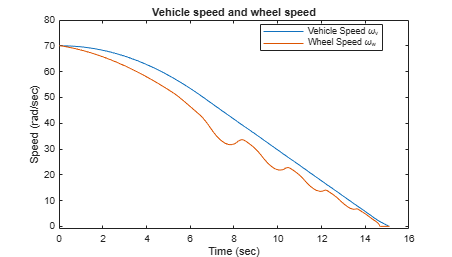
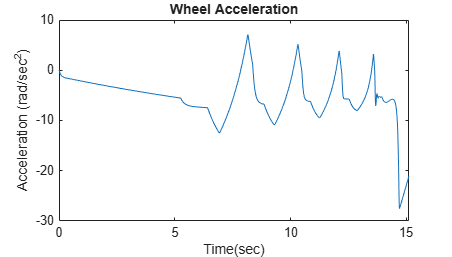
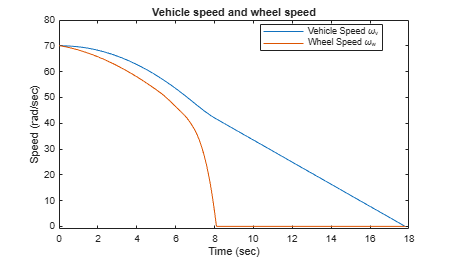
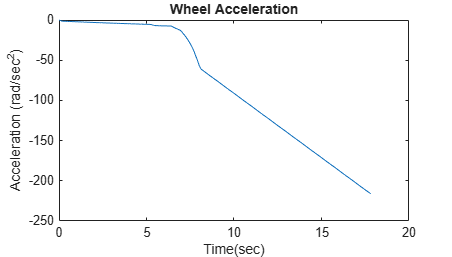
Estas gráficas muestran los resultados de la simulación ABS para parámetros predeterminados. La primera gráfica muestra la velocidad angular de la rueda y la correspondiente velocidad angular del vehículo. La segunda gráfica muestra que la velocidad de la rueda se mantiene por debajo de la velocidad del vehículo sin bloquearla y la velocidad del vehículo se reduce a cero en menos de 15 segundos. La aceleración de la rueda, el índice de deslizamiento de la rueda y la presión de frenado se monitorizan. El índice de deslizamiento de la rueda se utiliza para determinar si la rueda está bloqueada o no. Los ciclos de frenado se observan monitorizando la distancia de parada y la presión de frenado.
Simular sin ABS
Para obtener resultados más significativos, considere el comportamiento del vehículo sin ABS. En la ventana de comandos de MATLAB, establezca la variable de modelo ctrl = 0. Esta configuración desconecta la retroalimentación de deslizamiento del controlador, con lo que se obtiene un frenado máximo.
Ejecute la simulación de nuevo para modelar el frenado sin ABS.
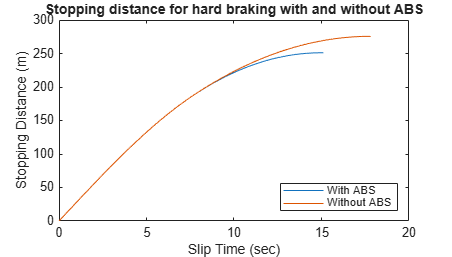
Frenado con ABS frente a frenado sin ABS
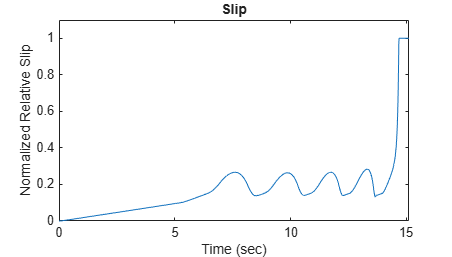
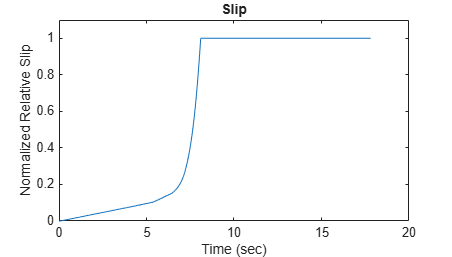
En la gráfica que muestra la velocidad del vehículo y la velocidad de la rueda, observe que la rueda se bloquea en unos siete segundos. A partir de ese momento, el frenado se aplica en una parte subóptima de la curva de deslizamiento. Es decir, cuando slip = 1, como se muestra en la gráfica de deslizamiento, el neumático patina tanto en el pavimento que la fuerza de fricción se reduce.
Esta gráfica muestra la distancia recorrida por el vehículo en ambos casos. Sin ABS, el vehículo patina unos 100 pies adicionales y tarda aproximadamente tres segundos más en detenerse.
Modelado ampliado
El controlador de este ejemplo está idealizado, pero se puede utilizar cualquier algoritmo de control en su lugar para evaluar el rendimiento del sistema. Para un prototipado rápido del algoritmo propuesto, también puede utilizar Simulink Coder™.
Simulink Coder genera y compila código C para que el hardware del controlador compruebe el concepto en un vehículo. Este proceso reduce significativamente el tiempo necesario para verificar las ideas nuevas permitiendo realizar pruebas en una fase temprana del ciclo de desarrollo.
Para una simulación de un sistema de frenado hardware-in-the-loop, Simulink Coder permite generar código C en tiempo real para eliminar el controlador de encendido/apagado y ejecutar las ecuaciones de movimiento en hardware en tiempo real para emular la dinámica de la rueda y el vehículo. Después, puede probar un controlador ABS real interconectándolo al hardware en tiempo real, que ejecuta el código generado. En esta situación, el modelo en tiempo real envía la velocidad de la rueda al controlador y el controlador envía la acción del freno al modelo.