Simular movimiento en seis grados de libertad (6DoF)
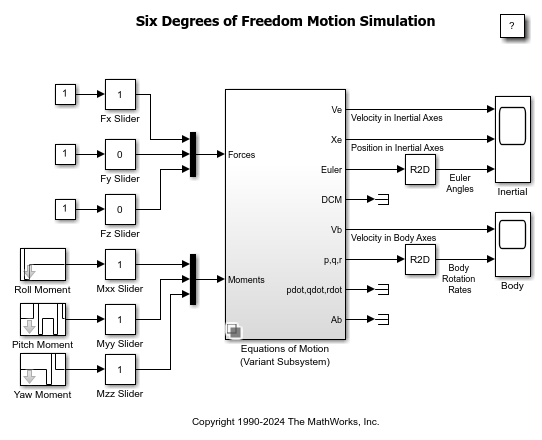
En este ejemplo se muestra cómo modelar seis grados de libertad (6DoF) en Simulink® utilizando el bloque 6DOF (Euler Angles) (Aerospace Blockset). El modelo replica los movimientos de un objeto o vehículo, incluidos tres ejes de rotación (cabeceo, alabeo y guiñada) y tres ejes de traslación.
Este modelo permite analizar la dinámica de aeronaves y naves espaciales en diversas condiciones sin necesidad de usar prototipos físicos.
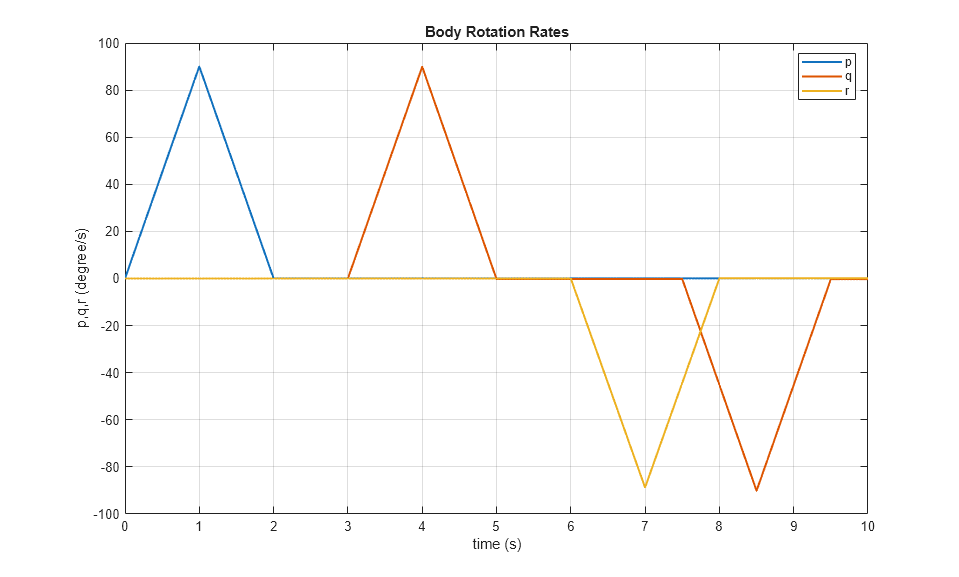
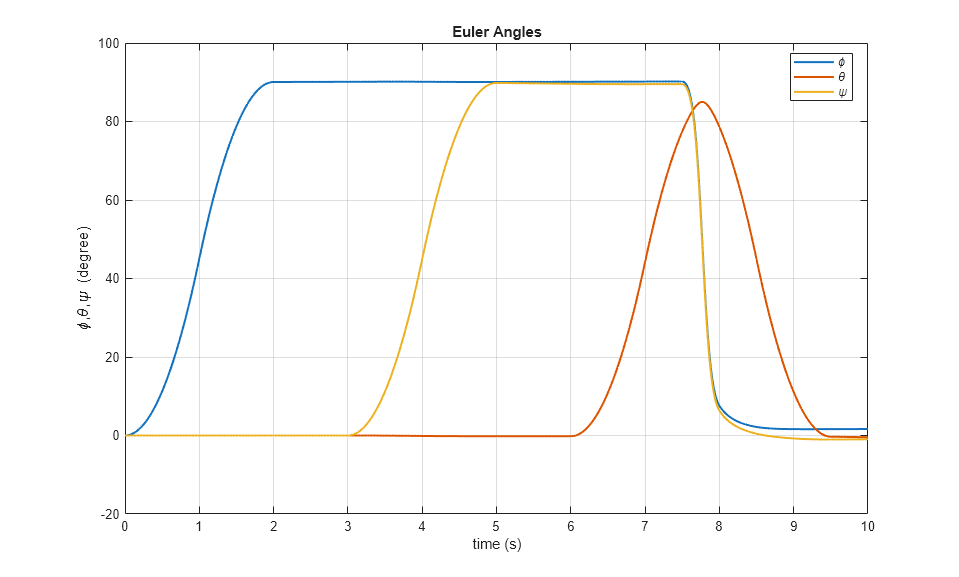
Efecto de la velocidad de rotación del cuerpo
Las velocidades de rotación del cuerpo del subsistema Equations of Motion imitan directamente las entradas de momento que se introducen en el sistema. Estos momentos son pares motor aplicados alrededor del centro de masa de la aeronave, que influyen en su movimiento de rotación alrededor de los tres ejes. Puede utilizar estas entradas para representar diversas fuerzas que actúan sobre la aeronave, como fuerzas aerodinámicas, propulsión del motor o deflexiones de la superficie de control. Cuando modela con precisión estos momentos, el bloque Equations of Motion puede simular la respuesta de la aeronave en términos de tasas de cabeceo, alabeo y guiñada, proporcionando una representación realista de su dinámica rotacional.
Simulación de bucle abierto
El subsistema Equations of Motion calcula aceleraciones lineales y angulares a partir de las fuerzas y momentos totales que actúan sobre el objeto, como una aeronave, para luego integrar estas aceleraciones para determinar velocidades y posiciones a lo largo del tiempo. En una configuración de bucle abierto, puede especificar entradas de simulación, como posiciones de la superficie de control o potencia del motor, sin ninguna retroalimentación del estado actual del sistema. Este método permite analizar el comportamiento del objeto en unas condiciones determinadas y ver los efectos de entradas específicas en el movimiento del objeto. Las simulaciones de bucle abierto permiten comprender el comportamiento del sistema antes de pasar a sistemas de control de bucle cerrado más complejos, donde los mecanismos de retroalimentación ajustan las entradas en función del estado del sistema.
Para modelar las ecuaciones de movimiento, puede cambiar entre usar ángulos de Euler y cuaterniones alternando la selección activa en la pestaña Variant Subsystem.
Para ajustar la aeronave alrededor de un punto operativo, consulte Airframe Trim and Linearize.
Consulte también
Temas
- Aerospace Blockset
- Create Aerospace Models (Aerospace Blockset)