NXT Gyro Sensor
Measure rate of rotation of NXT gyro sensor connected to EV3 brick
Libraries:
Simulink Support Package for LEGO MINDSTORMS EV3 Hardware /
NXT Sensors
Description
Add-On Required: This feature requires the Simulink Support Package for LEGO MINDSTORMS EV3 Hardware add-on.
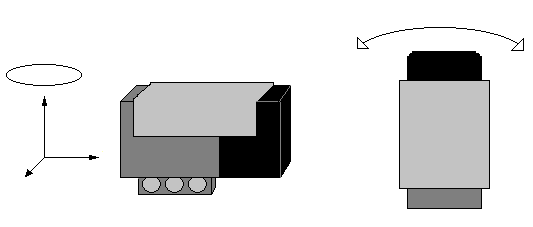
Use the NXT Gyro Sensor block to measure rate of rotation (yaw) along the single axis of the HiTechnic NXT Gyro Sensor (NGY1044) connected to LEGO® MINDSTORMS® EV3 brick. This yaw is indicated by a circle above the vertical axis in the image on the left, and by a double-arrow in the image on the right. Before using this sensor for precise measurements, use the offset value to remove small positive or negative bias in the output values, as described in the example below. For more information on NXT Gyro Sensor NGY1044, refer to its datasheet.
During simulations without hardware, this block emits zeros. See Block Produces Zeros or Does Nothing in Simulation.
Examples
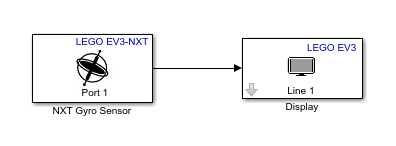
Use the NXT Gyro Sensor block to perform zero-calibration for the gyro sensor.
Open the legoev3nxtlib block library and copy the NXT Gyro
Sensor block as described in Open Block Library for LEGO MINDSTORMS EV3 Hardware.
Open the legoev3lib block library and copy the Display block to the same model
and connect these blocks.
Prepare and run the model on the EV3 brick as described in Run Model on EV3 Hardware. On the LCD display of the EV3 brick, observe any bias in the measurement values from the gyro sensor.
Double-click the NXT Gyro Sensor block. In the block mask that opens, increase or decrease the offset value to reduce the bias.
Save the changes to your model and run the model again. Change the offset value until the bias is nearly zero.
Ports
Output
Parameters
Version History
Introduced in R2012a
See Also
Display | Run Model on EV3 Hardware | Open Block Library for LEGO MINDSTORMS EV3 Hardware