Model Configuration Parameters for Parrot Minidrone
Hardware Implementation Pane Overview
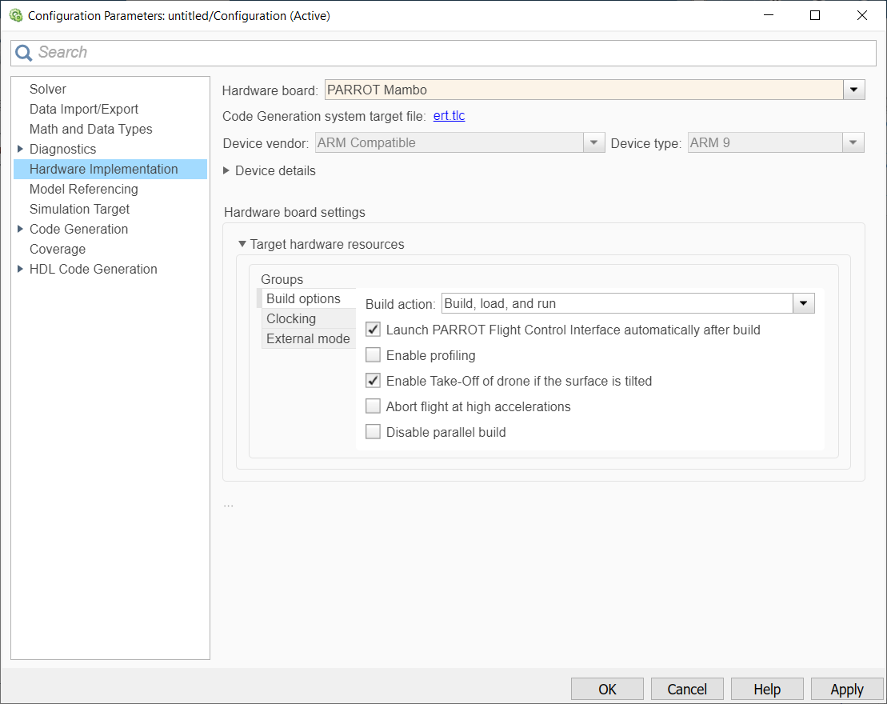
Default Hardware Implementation Pane
Configure Parrot® minidrone to run Simulink® models.
In the Simulink Editor, select Simulation > Model Configuration Parameters.
In the Configuration Parameter dialog box, click Hardware Implementation.
Set the Hardware board parameter to
Parrot Rolling SpiderorParrot Mambo.The parameter values under Hardware board settings are automatically populated to their default values.
You can optionally adjust these parameters for your particular use case.
To apply the changes, click Apply.
For more information on selecting a hardware support package and general configuration settings, see Hardware Implementation Pane.
Build Options
| Parameter | Description | Default Value |
|---|---|---|
Option to specify whether you want only the build, or the build, load, and run actions during code generation |
| |
Launch Parrot Flight Control Interface automatically after build | Determines whether the Flight Control UI is automatically launched or not |
|
Determines whether profiling is enabled on the generated code |
| |
Determines whether the drone can perform the take-off when kept on a tilted surface |
| |
Determines whether the flight of the drone needs to be aborted at high accelerations |
| |
Sets the maximum acceleration of the drone beyond which the flight is aborted |
| |
Option to compile the generated code on multiple cores of the processor on the host computer |
|
Clocking
| Parameter | Description | Default Value |
|---|---|---|
The CPU clock frequency in MHz. |
|
External Mode
| Parameter | Description | Default Value |
|---|---|---|
| Communication interface | Transport layer used to exchange data between host and hardware. |
|
View External mode execution progress and updates |
| |
| Set logging buffer size automatically | Automatically preallocate buffer size |
|