simscape.multibody.ConstantVelocityPrimitive Class
Namespace: simscape.multibody
Superclasses: simscape.multibody.JointPrimitive
Description
Use an object of the simscape.multibody.ConstantVelocityPrimitive class to
construct a constant-velocity joint primitive. A constant-velocity joint primitive models a
specialized coupling between two shafts whose spin rates are exactly matched even when the
shafts are not aligned.
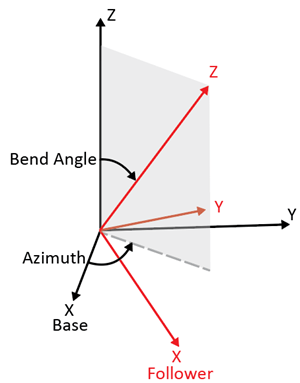
A constant-velocity primitive is parameterized by two angles: bend angle and azimuth. These angles define the relative orientation between the base and follower frames of the primitive. The azimuth specifies the rotation of the follower frame about the z-axis of the base frame and locates the plane in which the bend angle occurs. In the figure, the dashed line indicates the intersection between the plane of the bend angle and the xy-plane of the base frame. The bend angle specifies the orientation of the z-axis of the follower frame with respect to the z-axis of the base frame.
The InternalState property of a
ConstantVelocityPrimitive object specifies how to represent the internal
state of the primitive. You can specify the property as either a z-y-z
rotation sequence or a quaternion.
Class Attributes
Sealed | true |
ConstructOnLoad | true |
RestrictsSubclassing | true |
For information on class attributes, see Class Attributes.
Creation
Description
cvp = simscape.multibody.ConstantVelocityPrimitive
Properties
Version History
Introduced in R2022a