Smith Predictor Controller
Discrete-time Smith dead-time compensator
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
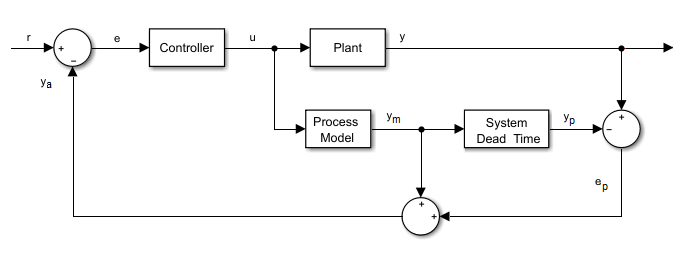
The Smith Predictor Controller block compensates for dead time by implementing a Smith dead-time PI control structure in discrete time. This diagram shows the equivalent circuit for the block.
Equations
The transfer function for a system with dead-time is
where:
τ is the system dead time.
Gp(s) is the process model.
Gf(s) is prediction error filter.
Examples

DC Motor Control (Smith Predictor)
A Smith Predictor speed-control structure for a DC motor. A PWM controlled four-quadrant Chopper is used to feed the DC motor. The Control subsystem includes the Smith predictor controller, and the PWM generation. A sensor measures the rotor speed with a delay of 5ms. The total simulation time (t) is 4 seconds. At t = 1.5 seconds, the load torque increases. At t = 2.5 seconds, the reference speed is changed from 1000 rpm to 2000 rpm.
Ports
Input
Output
Parameters
References
[1] Velagic. J. "Design of Smith-like Predictive Controller with Communication with Communication Delay Adaptation."International Journal of Electrical, Computer, Energetic, Electronic and Communication Engineering. Vol 2, Number 11, 2008, pp. 2447-2481.
Extended Capabilities
Version History
Introduced in R2017b