coverageDecomposition
Syntax
Description
The coverageDecomposition function decomposes coverage
regions into subregions using vertex-edge decomposition [1]. This enables you to plan
more efficient coverage paths using optimized planning options for each subregion to have
minimum turns and then connect the plans together.
polygons = coverageDecomposition(concavePolygon)concavePolygon into convex polygon areas
polygons based on minimum-width criteria [1].
polygons = coverageDecomposition(concavePolygon,IntersectionTol=tolerance)tolerance, which respect to the polygon edges.
Examples
This example shows how to plan a coverage path for a region in local coordinates and compares the results of using the exhaustive solver with the results of using the minimum traversal solver.
Define the vertices for a coverage space.
area = [5 8.75; 5 27.5; 17.5 22.5; 25 31.25; 35 31.25; 30 20; 15 6.25];
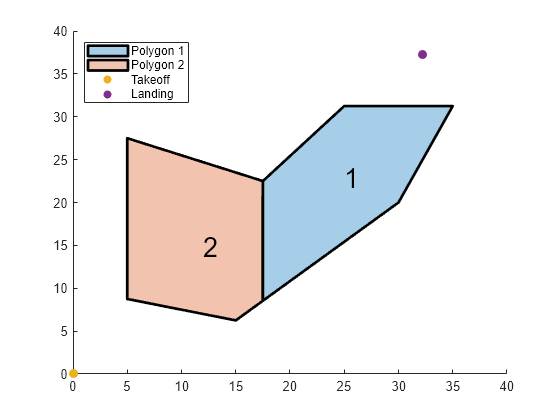
Because vertices define a concave polygon and the coverage planner requires convex polygons, decompose the polygon into convex polygons. Then create a coverage space with the polygons from decomposition.
polygons = coverageDecomposition(area); cs = uavCoverageSpace(Polygons=polygons);
Define the takeoff and landing positions at [0 0 0] and [32.25 37.25 0], respectively. Then show the coverage space and plot the takeoff and landing positions.
takeoff = [0 0 0]; landing = [32.25 37.25 0]; show(cs); exampleHelperPlotTakeoffLandingLegend(takeoff,landing)
Create a coverage planner with the exhaustive solver algorithm and another coverage planner with a minimum traversal solver algorithm. Because Polygon 2 is closer to the takeoff position, set the visiting sequence of the solver parameters such that we traverse Polygon 2 first.
cpeExh = uavCoveragePlanner(cs,Solver="Exhaustive"); cpMin = uavCoveragePlanner(cs,Solver="MinTraversal"); cpeExh.SolverParameters.VisitingSequence = [2 1]; cpMin.SolverParameters.VisitingSequence = [2 1];
Plan with both solver algorithms using the same takeoff and landing positions.
[wptsExh,solnExh] = plan(cpeExh,takeoff,landing); [wptsMin,solnMin] = plan(cpMin,takeoff,landing);
Show the planned path for both the exhaustive and the minimum traversal algorithms.
figure
show(cs);
title("Exhaustive Solver Algorithm")
exampleHelperPlotTakeoffLandingLegend(takeoff,landing,wptsExh)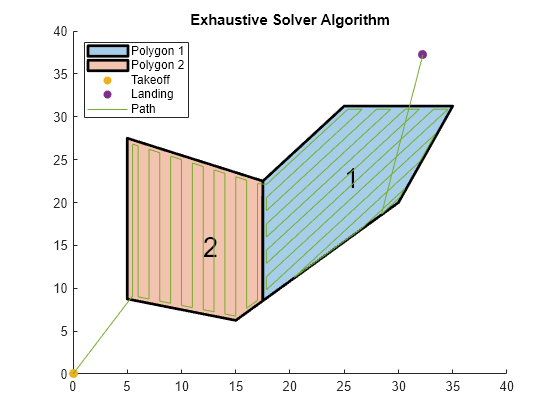
figure
show(cs);
title("Minimum Traversal Solver Algorithm")
exampleHelperPlotTakeoffLandingLegend(takeoff,landing,wptsMin)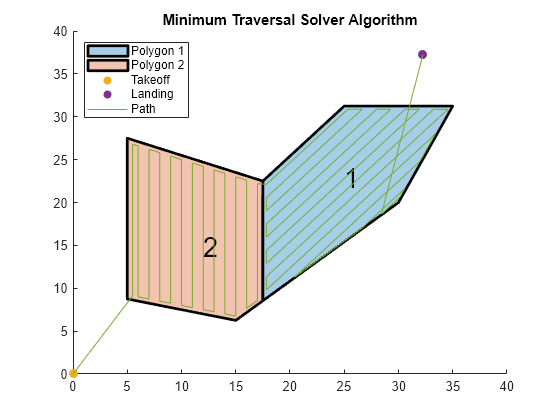
Export the waypoints from the minimum traversal solver to a .waypoints file with the reference frame set to north-east-down.
exportWaypointsPlan(cpMin,solnMin,"coveragepath.waypoints",ReferenceFrame="NED")
Input Arguments
Output Arguments
References
[1] Li, Yan, Hai Chen, Meng Joo Er, and Xinmin Wang. “Coverage Path Planning for UAVs Based on Enhanced Exact Cellular Decomposition Method.” Mechatronics 21, no. 5 (August 2011): 876–85. https://doi.org/10.1016/j.mechatronics.2010.10.009.