detectCharucoBoardPoints
Syntax
Description
Single Image ChArUco Board Detection
imagePoints = detectCharucoBoardPoints(I,patternDims,markerFamily,checkerSize,markerSize)
imagePoints = detectCharucoBoardPoints(___,intrinsics)intrinsics.
[
detects a ChArUco board in the image files specified by
imagePoints,imagesUsed] = detectCharucoBoardPoints(imageFileNames,___)imageFileNames, and additionally returns the list of images in
which the board is detected imagesUsed.
[___] = detectCharucoBoardPoints(
detects a ChArUco board in the specified images images,___)images.
Stereo Pair ChArUco Board Detection
[
detects a ChArUco board in a set of 2-D truecolor or grayscale image.imagePoints] = detectCharucoBoardPoints(I1,I2,patternDims,markerFamily,checkerSize,markerSize)
[
detects ChArUco corners in a set of 2-D truecolor or grayscale using approximated pose
estimation. The approximation is based on the estimated extrinsic properties, given the
camera imagePoints] = detectCharucoBoardPoints(I1,I2,patternDims,markerFamily,checkerSize,markerSize,intrinsics)intrinsics.
[
detects an ChArUco pattern in the stereo pairs of image files specified by
imagePoints,pairsUsed] = detectCharucoBoardPoints(imageFileNames1,imageFileNames2,patternDims,markerFamily,checkerSize,markerSize)imageFileNames1 and imageFileNames2. The
function additionally returns a list of the pairs in which the board is detected
pairsUsed.
[___] = detectCharucoBoardPoints(
detects an ChArUco pattern in the stereo pairs of image files specified by
I1,I2,intrinsics)images1 and images2.
Optional Arguments
[___] = detectCharucoBoardPoints(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)NumBorderBits=2 sets the
number of border bits to detect a marker to 2.
Examples
Specify your calibration images.
imds = imageDatastore("charuco");
images = imds.Files;Define the ChArUco board properties. Checker size and marker size are in millimeters.
markerFamily = "DICT_4X4_1000";
patternDims = [7 10];
checkerSize = 29;
markerSize = 21;Detect the board in the image.
imagePoints = detectCharucoBoardPoints(images,patternDims,markerFamily,checkerSize,markerSize);
Display the points from the first four images.
tiledlayout(2,2,TileSpacing="compact",Padding="compact"); for i = 1:4 nexttile imshow(images{i}) hold on plot(imagePoints(:,1,i,1),imagePoints(:,2,i,1),"gx"); end

Load a stereo image pair containing a ChArUco board into the workspace.
I1 = imread("leftChArUco.jpg"); I2 = imread("rightChArUco.jpg");
Define the ChArUco board properties. The checker board and marker size are specified in millimeters.
markerFamily = "DICT_4X4_1000";
patternDims = [7 10];
checkerSize = 29;
markerSize = 21;Detect the ChArUco board in the images.
imagePoints = detectCharucoBoardPoints(I1,I2,patternDims,markerFamily,checkerSize,markerSize);
Display the detected points in the left and right images.
figure(1) imshow(I1) hold on plot(imagePoints(:,1,1,1),imagePoints(:,2,1,1),"go"); title("Left camera")

figure(2) imshow(I2) hold on plot(imagePoints(:,1,1,2),imagePoints(:,2,1,2),"go"); title("Right camera")

Input Arguments
Pattern dimensions, specified as a two-element vector that represents the number of checkers in the dim1 and dim2 dimensions of the ChArUco board, respectively.
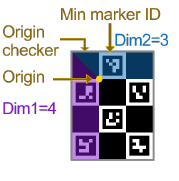
For more details on ChArUco board patterns, see Calibration Patterns.
ArUco marker family used in ChArUco board, specified as
"DICT_ARUCO_ORIGINAL", "DICT_4X4_1000", or
"DICT_5X5_1000", "DICT_6X6_1000", or
"DICT_7X7_1000".
ChArUco board checker side length, specified as a scalar in world units, such as
millimeters or inches. The checkerSize and
markerSize must be specified in the same world units and
checkerSize must be a larger value than
markerSize.
ArUco marker side length, specified as a scalar in world units, such as millimeters
or inches. The checkerSize and markerSize
must be specified in the same world units and checkerSize must be a
larger value than markerSize.
Camera intrinsics, specified as a scalar cameraIntrinsics object for a single camera, a two-element vector for a
stereo camera, cameraParameters object, or a stereoParameters object.
To specify a fisheyeIntrinsics object, first undistort the image using the undistortFisheyeImage function. Use the undistorted image for the
detectChArUcoBoardPoints image input and the cameraIntrinsics object that the undistortFisheyeImage function returns for the
intrinsics argument.
Image, specified as a 2-D truecolor image or grayscale image.
Data Types: uint8 | int16 | uint16 | single | double
Images, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera one, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Stereo pair images from camera two, specified as an H-by-W-by-numColorChannels-by-numImages array, where H and W describe the height and width of each image, respectively. numColorChannels is the number of color channels in each image, and numImages is the number of images.
Data Types: uint8 | int16 | uint16 | single | double
Image file names, specified as a cell array of character vectors or an array of strings.
Stereo image file names for camera one, specified as a cell array of character vectors or an array of strings.
Stereo image file names for camera two, specified as a cell array of character vectors or an array of strings.
Name-Value Arguments
Output Arguments
Tips
When no ArUco marker was detected in the board image, the function returns
imagePointswithNaNfor its surrounding ChArUco corner locations.To debug any missed detections of ArUco markers, you can use the
readArucoMarkerfunction.To specify a
fisheyeIntrinsicsobject, first undistort the image using theundistortFisheyeImagefunction. Use the undistorted image for thedetectChArUcoBoardPointsimage input and thecameraIntrinsicsobject that theundistortFisheyeImagefunction returns for theintrinsicsargument.To detect multiple ChArUco boards in the same image, use this function with a unique for
MinMarkerID, for each board.To use this function, the markers in the pattern must correspond to sequential IDs, each incremented by
1.