quatrotate
Rotate vector by quaternion
Syntax
Description
n = quatrotate(q,r)r by quaternion q and returns a final vector
n. If quaternions are not yet normalized, the function normalizes
them.
Aerospace Toolbox uses quaternions that are defined using the scalar-first convention. This function normalizes all quaternion inputs.
Examples
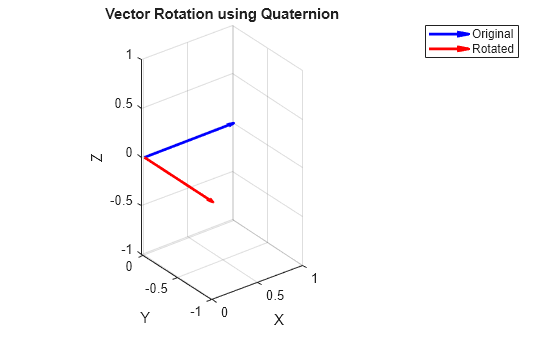
This example rotates a vector using a quaternion and visually compares the original and rotated vectors in 3D.
q = quaternion([90, 0, 0], 'eulerd', 'ZYX', 'frame'); v = [1; 0; 0]; v_rot = quatrotate(q, v'); quiver3(0,0,0,v(1),v(2),v(3),0,'b','LineWidth',2); hold on; quiver3(0,0,0,v_rot(1),v_rot(2),v_rot(3),0,'r','LineWidth',2); legend('Original','Rotated'); axis equal; grid on; title('Vector Rotation using Quaternion'); xlabel('X'); ylabel('Y'); zlabel('Z'); hold off;
This example shows how to rotate a 1-by-3 vector by a 1-by-4 quaternion.
q = [1 0 1 0]; r = [1 1 1]; n = quatrotate(q, r)
n = 1×3
-1 1 1
This example shows how to rotate two 1-by-3 vectors by a 1-by-4 quaternion.
q = [1 0 1 0]; r = [1 1 1; 2 3 4]; n = quatrotate(q, r)
n = 2×3
-1 1 1
-4 3 2
This example shows how to rotate a 1-by-3 vector by two 1-by-4 quaternions.
q = [1 0 1 0; 1 0.5 0.3 0.1]; r = [1 1 1]; n = quatrotate(q, r)
n = 2×3
-1.0000 1.0000 1.0000
0.8519 1.4741 0.3185
This example shows how to rotate multiple vectors by multiple quaternions.
q = [1 0 1 0; 1 0.5 0.3 0.1]; r = [1 1 1; 2 3 4]; n = quatrotate(q, r)
n = 2×3
-1.0000 1.0000 1.0000
1.3333 5.1333 0.9333
Input Arguments
Output Arguments
More About
References
[1] Stevens, Brian L., Frank L. Lewis. Aircraft Control and Simulation, 2nd Edition. Hoboken, NJ: John Wiley & Sons, 2003.
[2] Diebel, James. "Representing Attitude: Euler Angles, Unit Quaternions, and Rotation Vectors." Stanford University, Stanford, California, 2006.
Version History
Introduced in R2006b