gensig
Crear señales periódicas para simular la respuesta del sistema con lsim
Descripción
[ genera una señal periódica de amplitud unitaria con el tipo y el periodo especificados. Utilice la señal u,t] = gensig(type,tau)u y el vector de tiempo t correspondiente para simular la respuesta en el tiempo de un sistema dinámico de una entrada con lsim o lsimplot, o para obtener características de respuesta con lsiminfo. Para crear señales para sistemas de varias entradas, use llamadas repetidas a gensig y apile los vectores u resultantes en una matriz. Cuando utiliza u y t para simular un modelo de sistema dinámico, el software interpreta que t tiene las unidades de la propiedad TimeUnit del modelo.
Ejemplos
Genere una onda cuadrada con un periodo de 2 s que podrá usar para simular una respuesta del sistema dinámico con lsim.
tau = 2;
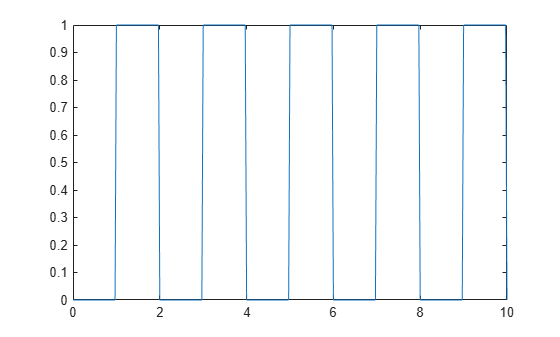
[u,t] = gensig("square",tau);gensig devuelve la señal como vector u y el vector de tiempo t correspondiente. Cuando no se especifica la duración de la señal, gensig genera una señal que se ejecuta durante cinco periodos (Tf = 5*tau). Cuando no se especifica una unidad de tiempo, la función se establece de forma predeterminada en 64 muestras por periodo (Ts = tau/64). Por lo tanto, esta señal se ejecuta durante 10 s con una unidad de tiempo de 0.03125 s. Represente la señal.
plot(t,u)
gensig devuelve una onda cuadrada de amplitud unitaria que comienza en cero. Puede modificar u para obtener una onda cuadrada con una amplitud y unos puntos finales diferentes. Cree una onda cuadrada de periodo 5 s que se ejecuta durante 15 s y que cambia entre los valores –1 y 1.
tau = 5;
Tf = 15;
[u0,t] = gensig("square",tau,Tf);
u = 2*u0-1;
plot(t,u)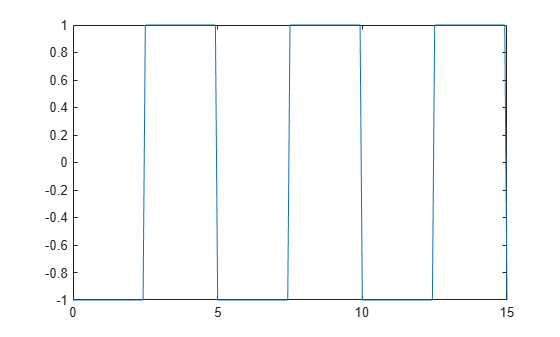
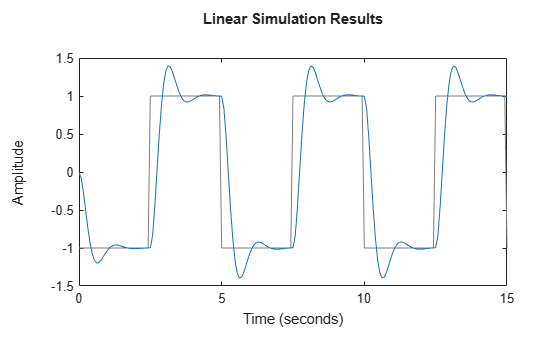
Use t y u para simular la respuesta de un sistema dinámico con lsim. El comando lsim asume que los valores de t están en las unidades del modelo de sistema dinámico que simula (sys.TimeUnit).
sys = tf(30,[1 5 30]); lsim(sys,u,t)
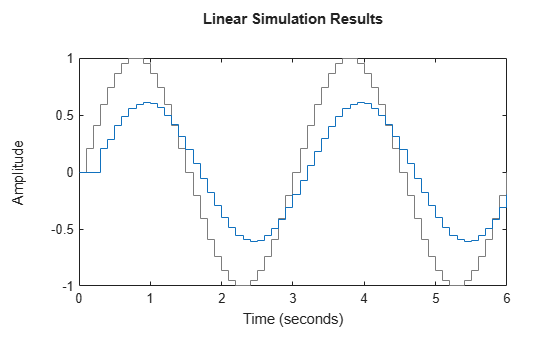
Si no especifica una unidad de tiempo (tiempo de muestreo), gensig se establece de forma predeterminada en 64 muestras por periodo o Ts = tau/64. Cuando desee simular un modelo en tiempo discreto con lsim, la unidad de tiempo debe ser igual al tiempo de muestreo del modelo. Proporcione gensig con este tiempo de muestreo para generar una señal adecuada. Por ejemplo, genere una onda sinusoidal para simular un modelo de sistema dinámico en tiempo discreto con un tiempo de muestreo de 0.1 s.
tau = 3;
Tf = 6;
Ts = 0.1;
[u,t] = gensig("sine",tau,Tf,Ts);Simule la respuesta del modelo a la señal generada.
sys = zpk([],[-0.1,-0.5],1,Ts); lsim(sys,u,t,Ts)
Para simular un sistema de varias entradas con lsim, debe proporcionar las señales de entrada como matriz cuyas columnas representan la señal aplicada a cada entrada. Dicho de otra forma, u(:,j) es la señal aplicada a la j-ésima entrada en cada unidad de tiempo. Para usar gensig a fin de generar esta matriz de entrada, cree las señales para cada entrada de forma conjunta y apílelas juntas en una matriz.
Por ejemplo, cree una señal para simular un sistema de dos entradas que inyecta una onda cuadrada con un periodo de 2 s en la primera entrada y un pulso cada 1.5 s en la segunda entrada. Especifique una duración y un tiempo de muestreo de forma que los dos vectores tengan la misma longitud, necesario para combinarlos en una matriz.
Tf = 8; Ts = 0.02; [uSq,t] = gensig("square",2,Tf,Ts); [uPu,~] = gensig("pulse",1.5,Tf,Ts); u = [uSq uPu]; size(u)
ans = 1×2
401 2
Cada fila u(i,:) de u es la señal (u1,u2) aplicada a las entradas en la unidad de tiempo t(i) correspondiente.
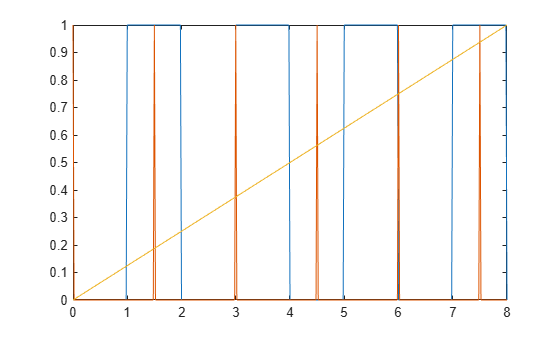
Puede combinar señales que no se han creado con gensig siempre que tengan la misma longitud. Por ejemplo, supongamos que desea simular un sistema de tres entradas aplicando uSq a la primera entrada y uPu a la segunda entrada. También desea aplicar una rampa a la tercera entrada que comienza en 0 y aumenta a 1 en la unidad de tiempo final Tf = 8. Asegúrese de que la señal sea un vector columna de la misma longitud que uSq y uPu. Luego, combínela con las otras señales para crear la matriz de entrada.
uRa = linspace(0,1,401)'; u = [uSq uPu uRa]; size(u)
ans = 1×2
401 3
plot(t,u)
Ahora puede usar u y t para simular el modelo de tres entradas. Genere un modelo en espacio de estados de tres entradas y dos salidas, y simule la respuesta en sus dos salidas a u aplicado en las entradas.
rng('default')
sys = rss(3,2,3);
lsim(sys,u,t)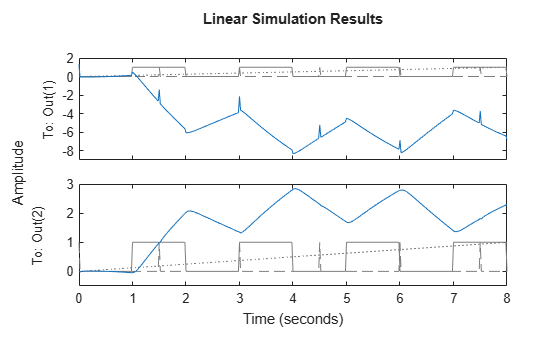
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido antes de R2006a