LPV System
Simular sistemas lineales de parámetros variantes (LPV)
Bibliotecas:
Control System Toolbox /
Linear Parameter Varying
Descripción
Un sistema lineal de parámetros variantes (LPV) es un modelo lineal de espacio de estados cuya dinámica varía en función de ciertos parámetros variantes en el tiempo denominados parámetros de programación. En MATLAB®, los modelos LPV se representan en forma de espacio de estados utilizando coeficientes dependientes de los parámetros.
En términos matemáticos, puede representar un sistema LPV de la siguiente forma.
En este caso:
u(t) son las entradas
y(t) son las salidas
x(t) son los estados del modelo con valor inicial xinit
es el vector de derivadas de estados para sistemas en tiempo continuo y el vector de actualización de estados x[k+1] para sistemas en tiempo discreto. En este caso, k es el índice entero que cuenta el número de periodos de muestreo Ts.
A(p), B(p), C(p) y D(p) son las matrices de espacio de estados parametrizadas por el vector de parámetros de planificación p.
Los parámetros p = p(t) son funciones medibles de las entradas y los estados del modelo. Pueden ser una cantidad escalar o un vector de varios parámetros. El conjunto de parámetros de programación define el espacio de programación sobre el que se define el modelo LPV.
dx0(p), x0(p), u0(p) y y0(p) son las compensaciones en los valores de , x(t), u(t) e y(t) para un valor determinado del parámetro p = p(t) o p[k].
Las compensaciones se pueden obtener devolviendo información adicional de linealización al llamar a las funciones
linearize(Simulink Control Design) ogetIOTransfer(Simulink Control Design). Para ver un ejemplo, consulte LPV Approximation of Boost Converter Model (Simulink Control Design).
Precaución
Evite que C(p) y D(p) dependan de la salida del sistema y. De lo contrario, la ecuación de espacio de estados resultante y = C(y)x + D(y)u crea un lazo algebraico, ya que calcular el valor de salida y requiere conocer el valor de salida. Este lazo algebraico tiende a ser inestable y divergente. En su lugar, intente expresar C y D en términos de tiempo t, la entrada de bloque u y las salidas de estado x.
Por motivos similares, evite planificar A(p) y B(p) basándose en la salida dx. Tenga en cuenta que no introducirá inestabilidades que A y B dependan de y cuando y es una combinación fija de estados y entradas (dicho de otra forma, cuando y = Cx + Du, donde C y D son matrices constantes).
El bloque implementa una representación en forma de cuadrícula del sistema LPV. Se elige una cuadrícula de valores para los parámetros de programación. En cada valor p = p* se especifica el sistema lineal correspondiente como objeto de modelo en espacio de estados (ss o idss (System Identification Toolbox)). Para configurar el bloque LPV System se utiliza el arreglo generado de modelos en espacio de estados.
El bloque admite un arreglo de modelos en espacio de estados con información sobre el punto de funcionamiento. El bloque extrae la información sobre las variables de planificación de la propiedad SamplingGrid del arreglo LTI. Las variables de programación definen la cuadrícula de los modelos LPV. Son cantidades de valor escalar que pueden ser funciones de tiempo, entradas y estados, o constantes. Se utilizan para elegir la dinámica local en el espacio operativo. El software interpola los valores de estas variables. El bloque utiliza este arreglo con técnicas de interpolación y extrapolación de datos para la simulación.
Ejemplos
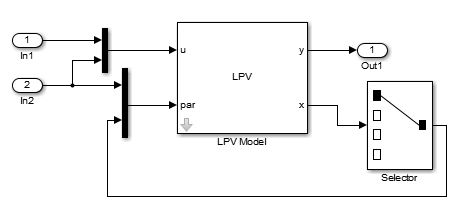
Considere un modelo LPV de dos entradas, tres salidas y cuatro estados. Utilice la entrada u(2) y el estado x(1) como parámetros de programación. Configure el modelo de Simulink® como se muestra en la siguiente figura.
Considere un sistema lineal masa-resorte-amortiguador cuya masa cambia en función de un comando de carga externa. La ecuación que rige este sistema es la siguiente:
En este caso, es la masa dependiente del comando externo , es el coeficiente de amortiguación, es la rigidez del muelle y es la aplicación de la fuerza. Por su parte, es la posición de la masa en un momento dado. Para un valor fijo de , el sistema es lineal y se expresa como
,
donde es el vector de estado y es el valor de la masa para un valor dado de .
En este ejemplo, se quiere estudiar el comportamiento del modelo en un rango de valores de entrada de 1 a 10 V. Para cada valor de , mida la masa y calcule la representación lineal del sistema. Supongamos que la masa está relacionada con la entrada según la relación . Para valores de u del 1 al 10, se obtiene el siguiente arreglo de sistemas lineales.
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
La variable es la entrada de programación. Añada esta información al modelo.
sys.SamplingGrid = struct('LoadCommand',u);Configure el bloque LPV System:
Introduzca
sysen el campo State-space array.Conecte el puerto de entrada
para una señal fuente unidimensional que genere los valores del comando de carga. Si la fuente proporciona valores entre 1 y 10, el bloque utiliza la interpolación para calcular el modelo lineal en un momento determinado. De lo contrario, el bloque utiliza la extrapolación.

Simule el modelo LPV con la aplicación de una fuerza constante de 100 N y valores aleatorios para la variable de planificación del comando de carga.
model = "simMSDLPV";
open_system(model);

Este ejemplo muestra cómo simular un modelo lineal de parámetros variantes (LPV) de la velocidad de un motor con el bloque LPV System. El bloque LPV System interpola un arreglo de espacio de estados para modelar la respuesta LPV. Normalmente, puede obtener un arreglo de ese tipo linealizando por lotes un modelo no lineal a lo largo de un rango de condiciones de funcionamiento. Este ejemplo ofrece un resultado linealizado del modelo de velocidad del motor en scdspeedlpvData. Para más información sobre cómo linealizar un modelo, consulte Linearize Engine Speed Model (Simulink Control Design).
Abra el modelo.
model = "scdspeedLPVCompare";
open_system(model);
Cargue el resultado de la linealización para implementar el modelo LPV.
load scdspeedlpvData.matEl modelo LPV se implementa en el subsistema LPV Model.

El bloque LPV System toma el ángulo del acelerador como entrada y utiliza la salida de la velocidad como variable de planificación. Los parámetros del bloque se configuran como se muestra en esta imagen. En este caso, el arreglo de espacio de estados sys y las compensaciones se obtienen linealizando el modelo no lineal por lotes.

Simule el modelo y represente la comparación de la respuesta.
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")
El modelo LPV proporciona una buena aproximación de la respuesta no lineal.
Ejemplos ampliados

LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape™ Electrical™ model using a linear parameter varying model.

Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model.

Using LTI Arrays for Simulating Multi-Mode Dynamics
Construct a Linear Parameter Varying (LPV) representation of a system that exhibits multi-mode dynamics.

Approximate Nonlinear Behavior Using Array of LTI Systems
You can use linear parameter varying models to approximate the dynamics of nonlinear systems.
Limitaciones
Los retardos internos no se pueden extrapolar para que sean menores que su valor mínimo en el arreglo del modelo en espacio de estados.
Cuando se utiliza una cuadrícula dispersa de modelos lineales para definir el sistema LPV, solo se utiliza el esquema de interpolación por vecinos más cercanos. Esto puede reducir la precisión de los resultados de la simulación. Se recomienda trabajar con cuadrículas rectangulares creadas utilizando
ndgrid.