Datos y gráficas de la respuesta en el dominio del tiempo
Este ejemplo muestra cómo obtener datos de respuesta al impulso y escalón, así como gráficas de respuesta al impulso y escalón, a partir de un modelo de sistema dinámico.
Cree un modelo de función de transferencia y represente gráficamente su respuesta a una entrada de escalón = 0.
H = tf([8 18 32],[1 6 14 24]); step(H);
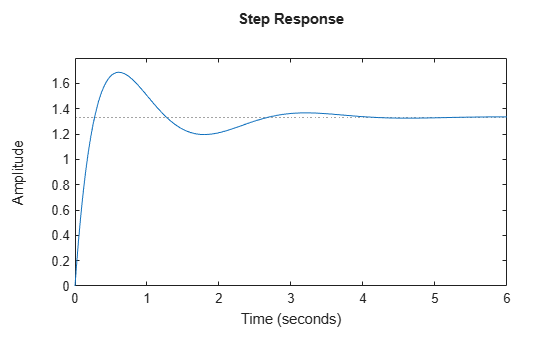
Cuando se llama a step sin argumentos de salida, este representa la respuesta al escalón en la pantalla. A menos que especifique un intervalo de tiempo para representar, step escoge automáticamente un intervalo de tiempo que ilustra la dinámica del sistema.
Calcule los datos de la respuesta al escalón desde = 0 (aplicación de la entrada de escalón) hasta = 8 s.
[y,t] = step(H,8);
Cuando se llama a step con argumentos de salida, el comando devuelve los datos de respuesta al escalón y. El vector t contiene los valores temporales correspondientes.
Represente la respuesta de H a una entrada de impulso aplicada a = 0. Represente la respuesta con una cuadrícula.
impulseplot(H)
grid on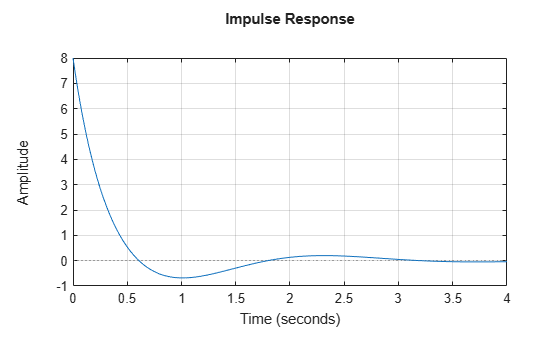
Calcule 200 puntos de datos de respuesta al impulso desde = 1 (un segundo después de la aplicación de la entrada del impulso) hasta = 3 s.
[y,t] = impulse(H,linspace(1,3,200));
En cuanto a step, puede omitir el vector de tiempo para permitir que impulse seleccione automáticamente un intervalo de tiempo.
Consulte también
step | impulse | stepplot | impulseplot | timeoptions