Detection and Tracking
Automated Driving Toolbox™ perception algorithms use data from cameras and lidar scans to enhance situational awareness of the vehicle. Using these perception algorithms, you can detect and track objects of interest and locate them in a driving scenario. You can leverage advanced deep learning and machine learning techniques for object detection and fuse those detection measurements from various sensors to track objects in the environment. You can build on these algorithms and create autonomous driving applications such as automatic braking and steering.
Categories
- Camera Sensor Configuration
Monocular camera sensor calibration, image-to-vehicle coordinate system transforms, bird’s-eye-view image transforms
- Object and Lane Detection
Lane boundary, pedestrian, vehicle, and other object detections using machine learning and deep learning
- Tracking and Sensor Fusion
Object tracking and multisensor fusion, bird’s-eye plot of detections and object tracks
Featured Examples

Create 360° Bird's-Eye-View Image Around a Vehicle
Create a 360° bird's-eye-view image around a vehicle for use in a surround view monitoring system. It then shows how to generate code for the same bird's-eye-view image creation algorithm and verify the results.

Visual Perception Using Monocular Camera
Construct a monocular camera sensor simulation capable of lane boundary and vehicle detections.

Lane Detection in Lidar Data Using Deep Learning
Detect lanes in lidar point clouds using LLDN-GFC deep learning network.

Train a Deep Learning Vehicle Detector
Train a vision-based vehicle detector using deep learning.

Extended Object Tracking of Highway Vehicles with Radar and Camera
Track objects whose dimensions span multiple sensor resolution cells.

Track-to-Track Fusion for Automotive Safety Applications
Fuse tracks from two vehicles to provide a more comprehensive estimate of the environment than seen by each vehicle.
Grid-Based Tracking in Urban Environments Using Multiple Lidars
Track moving objects by using multiple lidar sensors and a grid-based tracker.
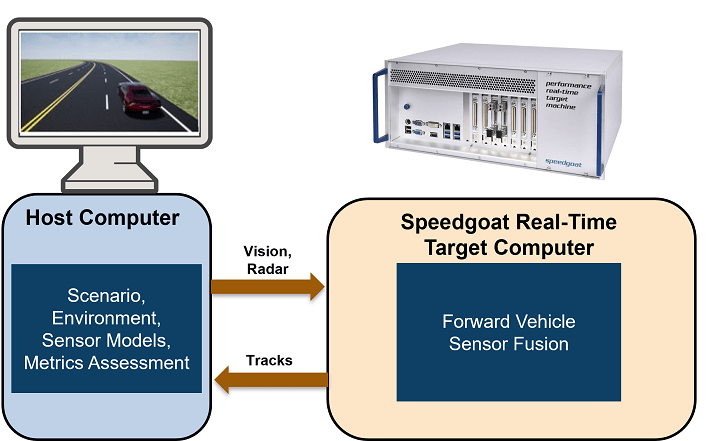
Automate Real-Time Testing for Forward Vehicle Sensor Fusion
Deploy and test forward vehicle sensor fusion component of highway lane following system in real-time.

Ground Plane and Obstacle Detection Using Lidar
Detect the ground plane and find nearby obstacles in 3-D lidar data.

Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation.

Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.