pathPlannerRRT
Configure RRT* path planner
Description
The pathPlannerRRT object configures a vehicle path planner
based on the optimal rapidly exploring random tree (RRT*) algorithm. An RRT* path
planner explores the environment around the vehicle by constructing a tree of random
collision-free poses.
Once the pathPlannerRRT object is configured, use the plan
function to plan a path from the start pose to the goal.
Creation
Description
planner = pathPlannerRRT(
returns a costmap)pathPlannerRRT object for planning a vehicle path.
costmap is a vehicleCostmap object specifying the environment around the
vehicle. costmap sets the Costmap property value.
planner = pathPlannerRRT(
sets properties of the path planner by using one or more name-value pair
arguments. For example, costmap,Name,Value)pathPlanner(costmap,'GoalBias',0.5)
sets the GoalBias property to a probability of 0.5. Enclose
each property name in quotes.
Properties
Object Functions
Examples
Plan a vehicle path to a parking spot by using the RRT* algorithm.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)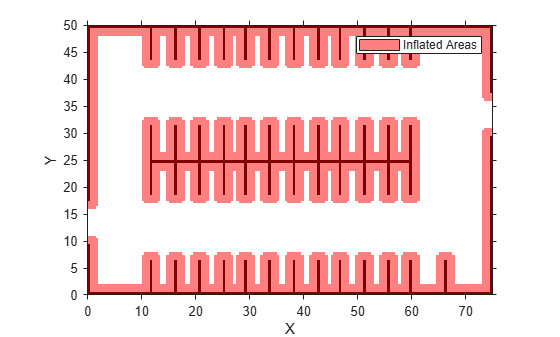
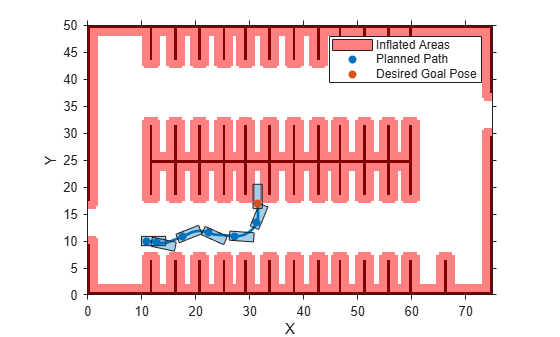
Define start and goal poses for the path planner as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation values are in degrees.
startPose = [11, 10, 0]; % [meters, meters, degrees]
goalPose = [31.5, 17, 90];Create an RRT* path planner to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Plot the planned path.
plot(planner)
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)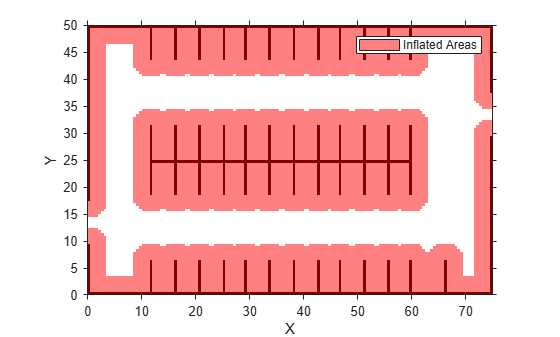
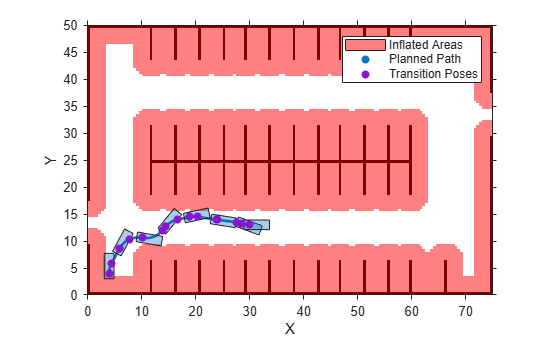
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [30, 13, 0];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
Tips
Updating any of the properties of the planner clears the planned path from
pathPlannerRRT. Callingplotdisplays only the costmap until a path is planned usingplan.To improve performance, the
pathPlannerRRTobject uses an approximate nearest neighbor search. This search technique checks onlysqrt(N)nodes, whereNis the number of nodes to search. To use exact nearest neighbor search, set theApproximateSearchproperty tofalse.The Dubins and Reeds-Shepp connection methods are assumed to be kinematically feasible and ignore inertial effects. These methods make the path planner suitable for low velocity environments, where inertial effects of wheel forces are small.
References
[1] Karaman, Sertac, and Emilio Frazzoli. "Optimal Kinodynamic Motion Planning Using Incremental Sampling-Based Methods." 49th IEEE Conference on Decision and Control (CDC). 2010.
[2] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins Set." Robotics and Autonomous Systems. Vol. 34, Number 4, 2001, pp. 179–202.
[3] Reeds, J. A., and L. A. Shepp. "Optimal paths for a car that goes both forwards and backwards." Pacific Journal of Mathematics. Vol. 145, Number 2, 1990, pp. 367–393.
Extended Capabilities
Version History
Introduced in R2018a