pc2dem
Syntax
Description
elevModel = pc2dem(ptCloudIn)elevModel for the
input point cloud. The output matrix contains generalized elevation information of the input
point cloud. For more information, see Algorithms.
elevModel = pc2dem(ptCloudIn,gridResolution)
[___] = pc2dem(___,
specifies options using one or more name-value arguments. For example,
Name,Value)'CornerFillMethod','min' specifies for the function to compute the
generalized elevation values for the grid corners in the DEM as the minimum elevation in the
default search radius of each grid corner.
Examples
Create a lasFileReader object to read point cloud data stored in aerialLidarData.laz file.
fileName = fullfile(toolboxdir("lidar"),"lidardata","las", ... "aerialLidarData.laz"); lasReader = lasFileReader(fileName);
Read point cloud data from the file using the readPointCloud function.
ptCloud = readPointCloud(lasReader);
Visualize the point cloud data.
figure
pcshow(ptCloud.Location)
title("Point Cloud")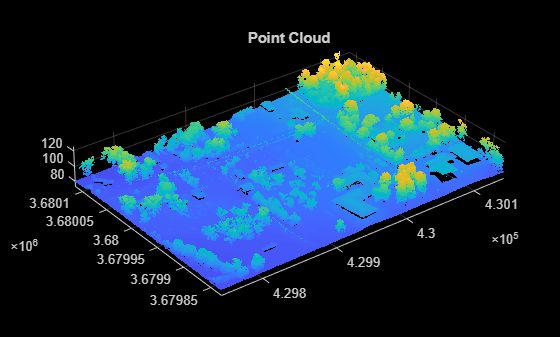
Segment the ground points from the point cloud data.
groundPtsIdx = segmentGroundSMRF(ptCloud);
Extract the ground points.
ptCloudWithGround = select(ptCloud,groundPtsIdx);
Visualize the ground points.
figure
pcshow(ptCloudWithGround.Location)
title("Ground Points")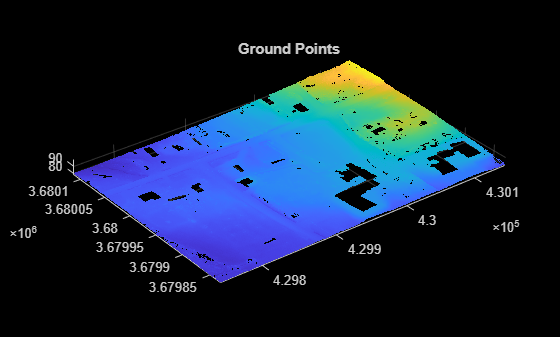
Create a digital terrain model (DTM) from the segmented ground points.
terrainModel = pc2dem(ptCloudWithGround);
Visualize the DTM.
figure
imagesc(terrainModel)
colormap(gray)
title("Digital Terrain Model")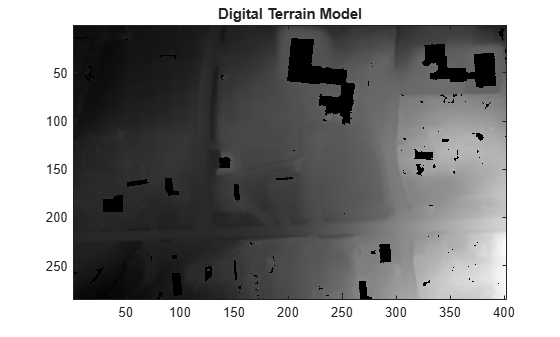
Create a lasFileReader object to read aerial point cloud data from "aerialLidarData.laz".
fileName = fullfile(toolboxdir("lidar"),"lidardata","las", ... "aerialLidarData.laz"); lasReader = lasFileReader(fileName);
Read the point cloud data of the first return of the lidar sensor from the LAS file using the readPointCloud function.
ptCloud = readPointCloud(lasReader,"LaserReturn",1);Create a digital surface model (DSM) of the point cloud with a grid element resolution of 1.1 meters.
gridRes = 1.1; surfaceModel = pc2dem(ptCloud,gridRes,"CornerFillMethod","max");
Define the location of the illumination source.
azimuthAng = 135; zenithAng = 45;
Compute the directional gradients of the DSM using the imgradientxy function.
[gx,gy] = imgradientxy(surfaceModel,"sobel");Normalize the gradients using the grid element resolution.
gx = gx/(8*gridRes); gy = gy/(8*gridRes);
Compute the slope and aspect of the DSM.
slopeAngle = atand(sqrt(gx.^2 + gy.^2)); aspectAngle = atan2d(gy,-gx); aspectAngle(aspectAngle < 0) = aspectAngle(aspectAngle < 0) + 360;
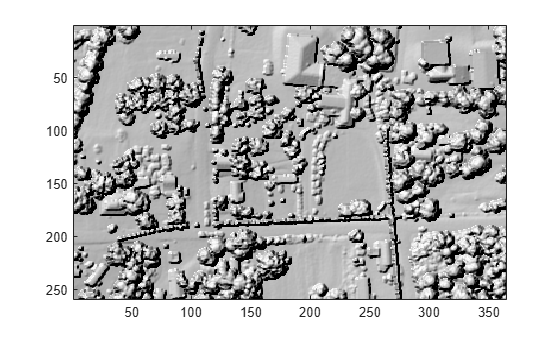
Calculate the hillshade using the algorithm from Esri®. A hillshade is a 3-D grayscale representation of a surface, with the relative position of the illumination source taken into account when shading the image.
h = 255.0*((cosd(zenithAng).*cosd(slopeAngle)) ...
+ (sind(zenithAng).*sind(slopeAngle).*cosd(azimuthAng - aspectAngle)));
h(h < 0) = 0;Visualize the hillshade of the DSM.
figure imagesc(h) colormap(gray)
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The function uses a local binning algorithm to create a digital elevation model (DEM) of the point cloud data. The algorithm assumes that the elevation of points is along the z-axis.
Local Binning Algorithm:
Divide the point cloud into a grid along the xy-dimensions (bird's eye view). Specify the grid dimensions using the
gridResolutionargument.Utilize the elevation information of all points within a circular region around each grid corner to compute generalized grid values. You can specify the search radius and computation method using the
'SearchRadius'and'CornerFillMethod'name-value arguments, respectively.If there are no points within the circular region, the algorithm does not compute a value and those grid corners remain unfilled. The function represents them as
NaN. The algorithm uses inverse distance weighted (IDW) interpolation to fill the unfilled grid corners. To specify the filter size for the IDW interpolation method, use the'FilterSize'name-value argument.