pcmedian
Apply median filter to point cloud coordinates along each axis
Description
ptCloudOut = pcmedian(ptCloudIn)pcmedian function doesn't pad zeros on the edges.
Rather, it operates only on the available neighborhood values.
If the input point cloud is an organized point cloud, the pcmedian
function uses N-by-N neighborhood method. If the point
cloud is unorganized, the function uses radial neighborhood method.
ptCloudOut = pcmedian(___,Name,Value)'FilterSize',3 sets the size of the median filter for organized point
clouds to 3.
Examples
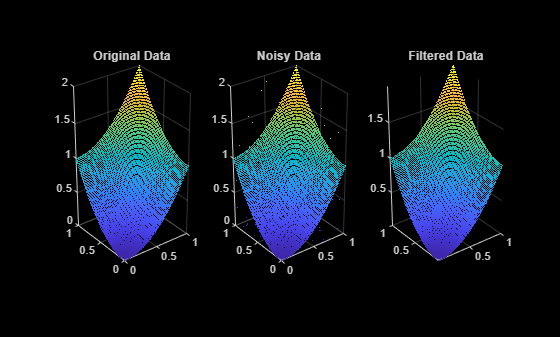
Use the median filter to remove noise from a point cloud. First, add random noise to a point cloud. Then, use the pcmedian function to filter the noise.
Create a point cloud.
gv = 0:0.01:1; [X,Y] = meshgrid(gv,gv); Z = X.^2 + Y.^2; ptCloud = pointCloud(cat(3,X,Y,Z));
Add random noise along the z-axis.
temp = ptCloud.Location; count = numel(temp(:,:,3)); temp((2*count) + randperm(count,100)) = rand(1,100); temp(count + randperm(count,100)) = rand(1,100); temp(randperm(count,100)) = rand(1,100); ptCloudA = pointCloud(temp);
Apply the median filter and display the three point clouds (original, noisy, and filtered).
ptCloudB = pcmedian(ptCloudA); subplot(1,3,1) pcshow(ptCloud) title('Original Data') subplot(1,3,2) pcshow(ptCloudA) title('Noisy Data') subplot(1,3,3) pcshow(ptCloudB) title('Filtered Data')
Load point cloud data into the workspace.
ptCloud = pcread('highwayScene.pcd'); roi = [0 20 0 20 -5 15]; indices = findPointsInROI(ptCloud,roi); ptCloud = select(ptCloud,indices); ptCloud = pcdownsample(ptCloud,'gridAverage',0.2);
Display the point cloud data. Each point is color-coded based on its x-coordinate.
figure
pcshow(ptCloud.Location,ptCloud.Location(:,1))
view(-90,2)
title('Original Point Cloud')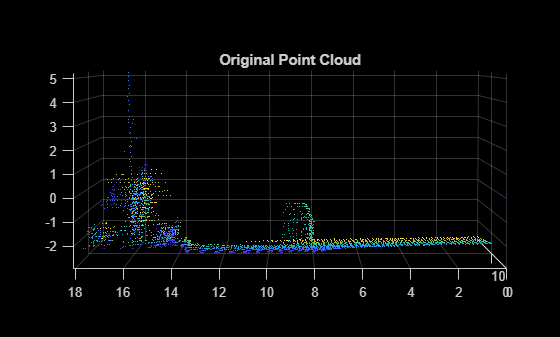
Add noise along the z-channel in the interval (a,b). Values of a and b are chosen to make the noise appear close to the ground.
temp = ptCloud.Location; count = numel(temp(:,3)); a = -2.5; b = -2; temp((2*count)+randperm(count,200)) = a+(b-a).*rand(1,200); ptCloudA = pointCloud(temp);
Display the noisy point cloud. Each point is color-coded based on its x-coordinate.
figure
pcshow(ptCloudA.Location,ptCloudA.Location(:,1))
view(-90,2)
title('Noisy Point Cloud')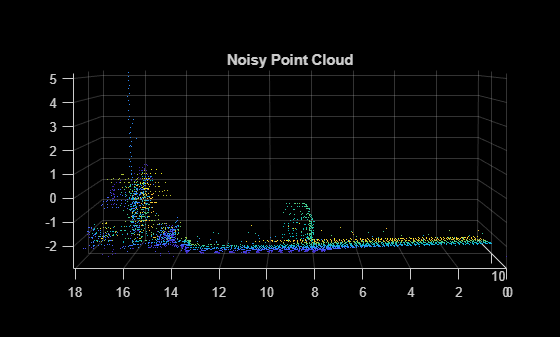
Apply median filter on the point cloud.
ptCloudB = pcmedian(ptCloudA,'Dimensions',3,'Radius',1);
Display the filtered point cloud. Each point is color-coded based on its x-coordinate.
figure
pcshow(ptCloudB.Location, ptCloudB.Location(:,1))
view(-90,2)
title('Filtered Point Cloud')
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2020b