Sensorless Approach for Position Sensing
An FOC algorithm requires real-time rotor position feedback to implement speed control as well as to perform mathematical transformation on the reference stator voltages and feedback currents. Traditionally, such algorithms rely on physical sensors. However, due to increased accuracy and cost effectiveness, sensorless position estimation solutions can act as a better alternative to physical sensors.
The sensorless observers and algorithms have known limitations regarding motor operations beyond the base speed. We recommend that you use the sensorless examples for operations up to base speed only.
Blocks
| Sliding Mode Observer | Compute electrical position and mechanical speed of rotor |
| Flux Observer | Compute electrical position, magnetic flux, and electrical torque of rotor |
| Pulsating High Freq Observer | Estimate initial rotor electrical position of interior PMSM using pulsating high frequency (PHF) injection (Since R2022b) |
| Extended EMF Observer | Compute electrical position and mechanical speed of permanent magnet synchronous motor (PMSM) (Since R2023a) |
Topics
- How to Tune Sensorless Position Estimators
Tune sensorless position estimators for accurate position and speed measurements.
- Sensorless Field-Oriented Control of PMSM
This example implements the field-oriented control (FOC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM).
- Sensorless Field-Oriented Control of Induction Motor
This example uses sensorless position estimation to implement the field-oriented control (FOC) technique to control the speed of a three-phase AC induction motor (ACIM).
Featured Examples

Estimate Initial Rotor Position Using Pulsating High-Frequency and Dual-Pulse Methods
Estimates the initial position (in electrical radians) of a stationary interior PMSM by using pulsating high-frequency (PHF) injection and dual pulse (DP) techniques.

Initial Position Estimation and Field-Weakening Control of IPMSM Using Pulsating High-Frequency Injection and Extended EMF Observer
Uses sensorless techniques such as pulsating high-frequency injection and extended EMF observer to estimate and track motor position to run an interior permanent magnet synchronous motor (IPMSM) operation using field-weakening control (FWC).
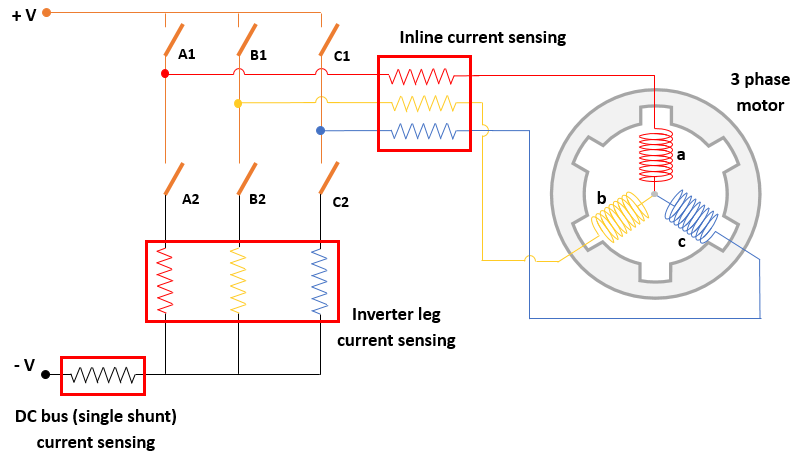
Sensorless Field-Oriented Control of PMSM Using DC Shunt Current Sensing
Implement sensorless field-oriented control (FOC) using only a single DC bus-based current measurement to run a permanent magnet synchronous motor (PMSM).

Sensorless Field-Oriented Control of PMSM Using I-F Control-Based Startup
Implements field-oriented control (FOC) using sensorless position estimation and I-F control-based startup to control the speed of a three-phase permanent magnet synchronous motor (PMSM).