read
Leer datos del receptor GPS
Sintaxis
Descripción
[ devuelve las lecturas GPS en formato tt,overrun] = read(gps)timetable. Esta es una lectura no bloqueante que devuelve puntos de datos N en formato de horario, donde N se especifica mediante la propiedad SamplesPerRead y timetable se especifica utilizando la propiedad OutputFormat del objeto gpsdev.
[ devuelve matrices de mediciones del GPS. Esta es una lectura no bloqueante que devuelve puntos de datos N en formato de matriz, donde N se especifica mediante la propiedad lla,groundSpeed,course,dops,gpsReceiverTime,timestamp,overrun] = read(gps)SamplesPerRead y matrix se especifica mediante la propiedad OutputFormat del objeto gpsdev.
Ejemplos
Lea los datos del receptor GPS conectado a la computadora host en un puerto serie específico.
Hardware requerido
Para ejecutar este ejemplo, necesita:
Módulo GPS UBlox Neo-6M
antena gps
Módulo USB a UART
cable USB
Cables de conexión
Conexión de hardware
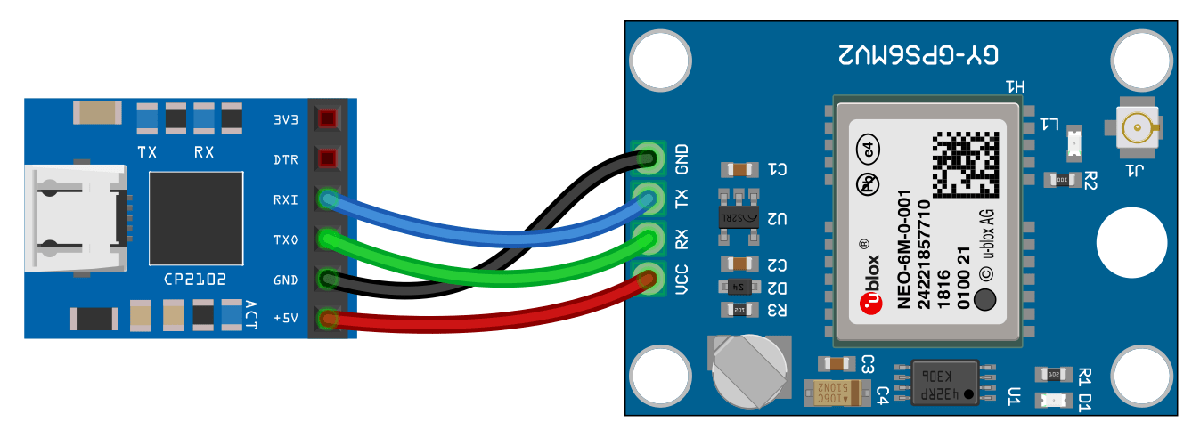
Conecte los pines del módulo GPS UBlox Neo-6M a los pines de su módulo USB a UART. Las conexiones son:
VCC - +5V
RX-TXO
TX-RXI
Tierra - Tierra
Conecte la antena GPS al módulo GPS. Conecte el módulo USB a UART a la computadora host con un cable USB. GPS Fix se puede adquirir fácilmente en lugares que tengan una vista despejada del cielo. Espere a que el módulo GPS adquiera señales de satélite (Reparación). Esto se puede verificar verificando el LED Fix (D1) de su módulo GPS.
Crear objeto GPS
Crea un objeto gpsdev para el receptor GPS conectado a un puerto específico. Especifique el formato de salida de los datos como un calendario.
gps = gpsdev('COM4','OutputFormat',"timetable")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Leer los datos del GPS
Leer los datos del GPS y devolverlos como horario.
[tt,overruns] = read(gps)
tt=1×5 timetable
Time LLA GroundSpeed Course DOPs GPSReceiverTime
________________________ _________________________ ___________ ______ ____________________ ________________________
22-Mar-2021 15:31:15.190 17.47 78.343 449.6 0.25619 NaN 9.31 1.48 9.19 22-Mar-2021 10:01:14.000
overruns = 0
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Suelte el objeto GPS para configurar las propiedades no ajustables. La función de liberación también borra el búfer y restablece las propiedades SamplesRead y SamplesAvailable.
release(gps)
Especifique el número de muestras por lectura en 2. Leer los datos del GPS.
gps.SamplesPerRead = 2; read(gps)
ans=2×5 timetable
Time LLA GroundSpeed Course DOPs GPSReceiverTime
________________________ _________________________ ___________ ______ ____________________ ________________________
22-Mar-2021 15:31:17.178 17.47 78.343 450 0.063791 NaN 9.32 1.48 9.2 22-Mar-2021 10:01:16.000
22-Mar-2021 15:31:17.178 17.47 78.343 450 0.063791 NaN 9.32 1.48 9.2 22-Mar-2021 10:01:16.000
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Limpiar
Cuando la conexión ya no sea necesaria, borre el objeto asociado.
delete(gps);
clear gps;Leer datos del receptor GPS conectado a la computadora host usando el objeto serialport.
Hardware requerido
Para ejecutar este ejemplo, necesita:
Módulo GPS UBlox Neo-6M
antena gps
Módulo USB a UART
cable USB
Cables de conexión
Conexión de hardware
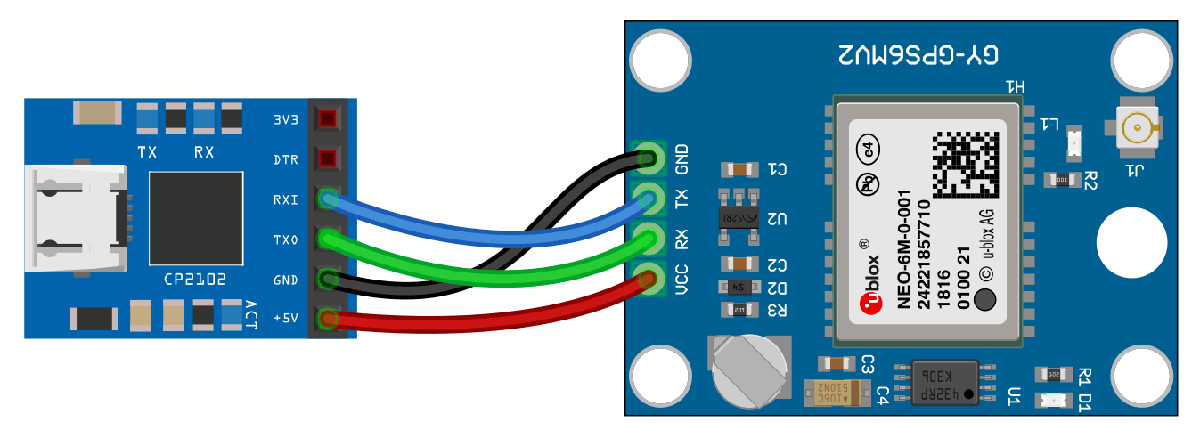
Conecte los pines del módulo GPS UBlox Neo-6M a los pines de su módulo USB a UART. Las conexiones son:
VCC - +5V
RX-TXO
TX-RXI
Tierra - Tierra
Conecte la antena GPS al módulo GPS. Conecte el módulo USB a UART a la computadora host con un cable USB. GPS Fix se puede adquirir fácilmente en lugares que tengan una vista despejada del cielo. Espere a que el módulo GPS adquiera señales de satélite (Reparación). Esto se puede verificar verificando el LED Fix (D1) de su módulo GPS.
Crear objeto GPS
Conéctese al receptor GPS utilizando el objeto serialport. Especifique el nombre del puerto y la velocidad en baudios. Especifique el formato de salida de los datos como matriz.
s = serialport('COM4',9600); gps = gpsdev(s,'OutputFormat',"matrix")
gps =
gpsdev with properties:
SerialPort: COM4
BaudRate: 9600 (bits/s)
SamplesPerRead: 1
ReadMode: "latest"
SamplesRead: 0
Show all properties all functions
Leer los datos del GPS
Lea los datos del GPS y devuélvalos como matrices.
[lla,speed,course,dops,gpsReceiverTime,timestamp,overruns] = read(gps)
lla = 1×3
NaN NaN NaN
speed = NaN
course = NaN
dops = 1×3
NaN NaN NaN
gpsReceiverTime = datetime
NaT
timestamp = datetime
22-Mar-2021 03:41:00.274
overruns = 1
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 1
gps.SamplesAvailable
ans = 0
Limpia todos los datos GPS acumulados en los buffers y restablece las propiedades SamplesRead y SamplesAvailable.
flush(gps)
Muestra el número de muestras leídas y las muestras disponibles en el búfer del host.
gps.SamplesRead
ans = 0
gps.SamplesAvailable
ans = 0
Limpiar
Cuando la conexión ya no sea necesaria, borre el objeto asociado.
delete(gps); clear gps; clear s;
Argumentos de entrada
Argumentos de salida
Más acerca de
Historial de versiones
Introducido en R2020b