gpsSensor
Modelo de simulación del receptor GPS.
Descripción
Los modelos gpsSensor System object™ modelan la salida de datos de un receptor del Sistema de Posicionamiento Global (GPS). El objeto modela el ruido de posición como un proceso de Gauss Markov de primer orden, en el que los valores sigma se especifican en las propiedades HorizontalPositionAccuracy y VerticalPositionAccuracy. El objeto modela el ruido de velocidad como ruido gaussiano con su valor sigma especificado en la propiedad VelocityAccuracy.
Para modelar un receptor GPS:
Cree el objeto
gpsSensory configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Descripción
GPS = gpsSensorgpsSensor System object que calcula una lectura del receptor del Sistema de Posicionamiento Global basándose en una señal de entrada de posición y velocidad local. La posición de referencia predeterminada en coordenadas geodésicas es
latitud: 0 o N
longitud: 0 o E
altitud: 0 metros
GPS = gpsSensor('ReferenceFrame',RF)gpsSensor System object que calcula una lectura del receptor del sistema de posicionamiento global relativa al marco de referencia RF.
GPS = gpsSensor(___, establece una o más propiedades utilizando argumentos de nombre-valor además de cualquiera de los argumentos de entrada anteriores.Name=Value)
Argumentos de entrada
Propiedades
Uso
Descripción
[ calcula las lecturas del receptor del sistema de navegación por satélite global a partir de las entradas de posición y velocidad.position,velocity,groundspeed,course] = GPS(truePosition,trueVelocity)
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
Crea un gpsSensor System object™ para modelar los datos del receptor GPS. Suponga una frecuencia de muestreo típica de un Hz y un tiempo de simulación de 1000 segundos. Definir la ubicación de referencia en términos de latitud, longitud y altitud (LLA) de Natick, MA (EE.UU.). Defina el sensor como estacionario especificando la verdadera posición y velocidad con ceros.
fs = 1; duration = 1000; numSamples = duration*fs; refLoc = [42.2825 -71.343 53.0352]; truePosition = zeros(numSamples,3); trueVelocity = zeros(numSamples,3); gps = gpsSensor('SampleRate',fs,'ReferenceLocation',refLoc);
Llame a gps con los truePosition y trueVelocity especificados para simular la recepción de datos GPS para una plataforma estacionaria.
position = gps(truePosition,trueVelocity);
Trace la posición real y las lecturas del sensor GPS para la posición.
t = (0:(numSamples-1))/fs; subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')

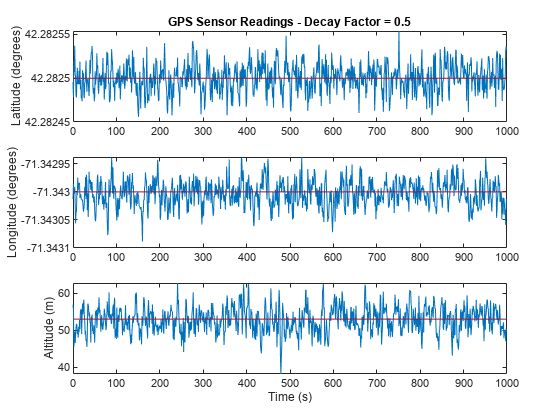
Las lecturas de posición tienen ruido controlado por HorizontalPositionAccuracy, VerticalPositionAccuracy, VelocityAccuracy y DecayFactor. La propiedad DecayFactor controla la deriva en el modelo de ruido. De forma predeterminada, DecayFactor se establece en 0.999, lo que se aproxima a un proceso de caminata aleatoria. Para observar el efecto de la propiedad DecayFactor:
Restablecer el objeto
gps.Establezca
DecayFactoren0.5.Llamar a
gpscon variables que especifiquen una posición estacionaria.Represente los resultados.
Las lecturas de posición GPS ahora oscilan alrededor de la posición real.
reset(gps) gps.DecayFactor = 0.5; position = gps(truePosition,trueVelocity); subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings - Decay Factor = 0.5') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')
Los receptores GPS logran una mayor precisión del rumbo a medida que aumenta la velocidad sobre el terreno. En este ejemplo, creará un objeto de simulación de receptor GPS y simulará los datos recibidos desde una plataforma que acelera desde una posición estacionaria.
Crea un gpsSensor System object ™ predeterminado para modelar los datos devueltos por un receptor GPS.
GPS = gpsSensor
GPS =
gpsSensor with properties:
SampleRate: 1 Hz
PositionInputFormat: 'Local'
ReferenceLocation: [0 0 0] [deg deg m]
HorizontalPositionAccuracy: 1.6 m
VerticalPositionAccuracy: 3 m
VelocityAccuracy: 0.1 m/s
RandomStream: 'Global stream'
DecayFactor: 0.999
Cree matrices para describir la posición y la velocidad de una plataforma en el sistema de coordenadas NED. La plataforma comienza desde una posición estacionaria y acelera a 60 m/s al noreste durante 60 segundos, luego tiene una aceleración vertical a 2 m/s durante 2 segundos, seguida de una velocidad de ascenso de 2 m/s durante otros 8 segundos. Suponga una velocidad constante, tal que la velocidad sea la derivada simple de la posición.
duration = 70; numSamples = duration*GPS.SampleRate; course = 45*ones(duration,1); groundspeed = [(1:60)';60*ones(10,1)]; Nvelocity = groundspeed.*sind(course); Evelocity = groundspeed.*cosd(course); Dvelocity = [zeros(60,1);-1;-2*ones(9,1)]; NEDvelocity = [Nvelocity,Evelocity,Dvelocity]; Ndistance = cumsum(Nvelocity); Edistance = cumsum(Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
Modele los datos de medición del GPS llamando al objeto GPS con sus matrices de velocidad y posición.
[~,~,groundspeedMeasurement,courseMeasurement] = GPS(NEDposition,NEDvelocity);
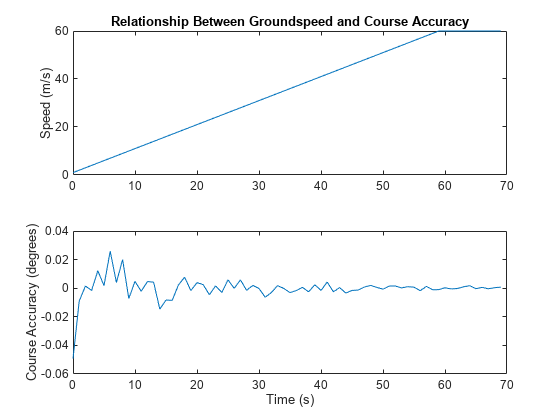
Trace la velocidad terrestre y la diferencia entre el rumbo real y el rumbo devuelto por el simulador GPS.
A medida que aumenta la velocidad sobre el terreno, aumenta la precisión del rumbo. Tenga en cuenta que el aumento de velocidad durante los últimos diez segundos no tiene ningún efecto, porque la velocidad adicional no está en el plano del suelo.
t = (0:numSamples-1)/GPS.SampleRate; subplot(2,1,1) plot(t,groundspeed); ylabel('Speed (m/s)') title('Relationship Between Groundspeed and Course Accuracy') subplot(2,1,2) courseAccuracy = courseMeasurement - course; plot(t,courseAccuracy) xlabel('Time (s)'); ylabel('Course Accuracy (degrees)')
Simule los datos de GPS recibidos durante una trayectoria desde la ciudad de Natick, MA, hasta Boston, MA.
Defina la latitud y longitud en grados decimales para la ciudad de Natick, MA, EE. UU., y Boston, MA, EE. UU. Para simplificar, establezca la altitud de ambas ubicaciones en cero.
NatickLLA = [42.27752809999999, -71.34680909999997, 0]; BostonLLA = [42.3600825, -71.05888010000001, 0];
Defina un movimiento que pueda llevar una plataforma de Natick a Boston en 20 minutos. Establezca el origen del sistema de coordenadas NED local como Natick. Crea un objeto waypointTrajectory para generar la trayectoria de 10 muestras a la vez.
fs = 1; duration = 60*20; bearing = 68; % degrees distance = 25.39e3; % meters distanceEast = distance*sind(bearing); distanceNorth = distance*cosd(bearing); NatickNED = [0,0,0]; BostonNED = [distanceNorth,distanceEast,0]; trajectory = waypointTrajectory( ... 'Waypoints', [NatickNED;BostonNED], ... 'TimeOfArrival',[0;duration], ... 'SamplesPerFrame',10, ... 'SampleRate',fs);
Cree un objeto gpsSensor para modelar la recepción de datos GPS para la plataforma. Establezca HorizontalPositionalAccuracy en 25 y DecayFactor en 0.25 para enfatizar el ruido. Establezca ReferenceLocation en las coordenadas de Natick en LLA.
GPS = gpsSensor( ... 'HorizontalPositionAccuracy',25, ... 'DecayFactor',0.25, ... 'SampleRate',fs, ... 'ReferenceLocation',NatickLLA);
Abra una figura y trace la posición de Natick y Boston en LLA. Ignore la altitud por simplicidad.
En un bucle, llame al objeto gpsSensor con la trayectoria de ground-truth para simular los datos GPS recibidos. Trazar la trayectoria ground-truth y el modelo de los datos GPS recibidos.
figure(1) plot(NatickLLA(1),NatickLLA(2),'ko', ... BostonLLA(1),BostonLLA(2),'kx') xlabel('Latitude (degrees)') ylabel('Longitude (degrees)') title('GPS Sensor Data for Natick to Boston Trajectory') hold on while ~isDone(trajectory) [truePositionNED,~,trueVelocityNED] = trajectory(); reportedPositionLLA = GPS(truePositionNED,trueVelocityNED); figure(1) plot(reportedPositionLLA(:,1),reportedPositionLLA(:,2),'r.') end

Como práctica recomendada, libere los System objects cuando esté completo.
release(GPS) release(trajectory)
Capacidades ampliadas
Historial de versiones
Introducido en R2019b