magcal
Coeficientes de calibración del magnetómetro
Descripción
Ejemplos
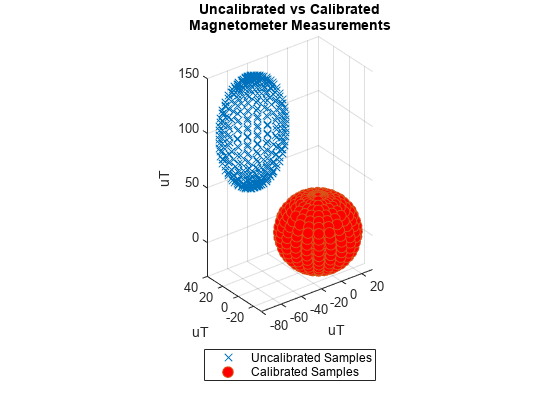
Genere datos de magnetómetro no calibrados que se encuentran en un elipsoide.
c = [-50; 20; 100]; % Ellipsoid center r = [30; 20; 50]; % Semiaxis radii [x,y,z] = ellipsoid(c(1),c(2),c(3),r(1),r(2),r(3),20); D = [x(:),y(:),z(:)];
Corrija los datos del magnetómetro para que queden sobre una esfera. La opción para la calibración está configurada de forma predeterminada en "automática".
[A,b,expmfs] = magcal(D); % Calibration coefficients expmfs % Display the expected magnetic field strength in uT
expmfs = 31.0723
C = (D-b)*A; % Calibrated dataVisualice los datos del magnetómetro calibrado y no calibrado.
figure(1) plot3(x(:),y(:),z(:),"LineStyle","none","Marker","X","MarkerSize",8) hold on grid(gca,"on") plot3(C(:,1),C(:,2),C(:,3),"LineStyle","none","Marker","o", ... "MarkerSize",8,"MarkerFaceColor","r") axis equal xlabel("uT") ylabel("uT") zlabel("uT") legend("Uncalibrated Samples","Calibrated Samples","Location","southoutside") title("Uncalibrated vs Calibrated" + newline + "Magnetometer Measurements") hold off
Argumentos de entrada
Argumentos de salida
Más acerca de
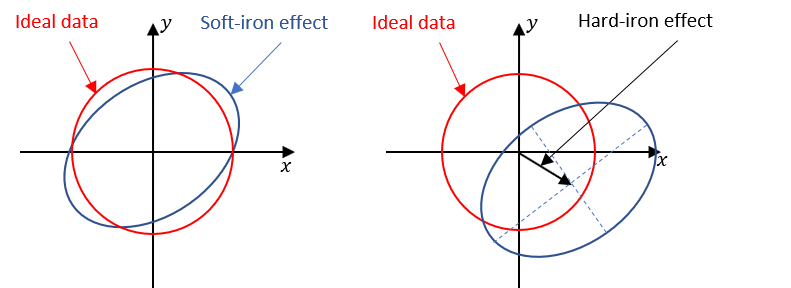
Debido a que un magnetómetro generalmente gira en un rango completo de rotación tridimensional, las mediciones ideales de un magnetómetro deberían formar una esfera perfecta centrada en el origen si el campo magnético no se perturba. Sin embargo, debido a los campos magnéticos distorsionantes de la placa de circuito del sensor y el entorno circundante, las mediciones magnéticas esféricas pueden verse perturbadas. En general, existen dos efectos.
El efecto de hierro dulce se describe como la distorsión del elipsoide desde una esfera y la inclinación del elipsoide, como se muestra en la figura de la izquierda. Este efecto es causado por perturbaciones que influyen en el campo magnético pero que pueden no generar su propio campo magnético. Por ejemplo, metales como el níquel y el hierro pueden provocar este tipo de distorsión.
El efecto de hierro duro se describe como el desplazamiento del centro del elipsoide desde el origen. Este efecto es producido por materiales que exhiben un campo aditivo constante al campo magnético terrestre. Esta compensación aditiva constante se suma al efecto de hierro dulce, como se muestra en la figura de la derecha.
El algoritmo subyacente en magcal determina el elipsoide que mejor se ajusta a las lecturas sin procesar del sensor e intenta "invertir" el elipsoide para producir una esfera. El objetivo es generar una matriz de corrección A para tener en cuenta el efecto del hierro dulce y un vector b para tener en cuenta el efecto del hierro duro. Las tres opciones de salida, 'eye', 'diag' y 'sym' corresponden a tres algoritmos de resolución de parámetros, y la opción 'auto' elige entre estas tres opciones para brindar el mejor ajuste.
Referencias
[1] Ozyagcilar, T. "Calibrating an eCompass in the Presence of Hard and Soft-iron Interference." Freescale Semiconductor Ltd. 1992, pp. 1-17.