sampleControl
Descripción
Ejemplos
Cree un propagador de estado y especifique la métrica de distancia para estimar el coste de propagación.
propagator = mobileRobotPropagator(DistanceEstimator="dubins");Crea un espacio de estados de Dubins.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi]);
Actualice el espacio de estados del propagador de estados utilizando el espacio de estados creado.
propagator.StateSpace = dubinsSpace; setup(propagator)
Crea un objeto navPath basado en múltiples puntos de referencia en un espacio de Dubins.
path = navPath(dubinsSpace);
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
append(path,waypoints)Interpola esa ruta para que contenga exactamente 250 puntos.
numStates = 250; interpolate(path,numStates)
Extrae la secuencia de movimientos de la ruta.
q1 = path.States(1:end-1,:); % Initial states q2 = path.States(2:end,:); % Final states
Calcule el coste de propagación al estado objetivo.
cost = distance(propagator,q1,q2);
Generar una serie de comandos de control y número de pasos para pasar del estado actual q1 con el comando de control u hacia el estado objetivo q2.
u = zeros(size(q1,1),propagator.NumControlOutput); steps = zeros(size(q1,1),1); for i = 1:size(q1,1) [u(i+1,:),steps(i)] = sampleControl(propagator,q1(i,:),u(i,:),q2(i,:)); end
Cree un objeto de ruta basado en control con el propagador de estado especificado y una secuencia de estados, controles, objetivos y duraciones especificados.
states = path.States; controls = u(2:end,:); targets = q2; durations = steps*propagator.ControlStepSize; path2 = navPathControl(propagator,states,controls,targets,durations);
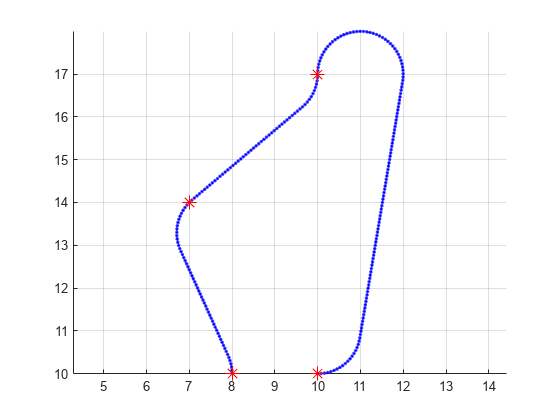
Visualiza los resultados.
figure grid on axis equal hold on plot(path2.States(:,1),path2.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2021b