reset
Sintaxis
Descripción
Ejemplos
Realice la localización y el mapeo visual simultáneo monocular (vSLAM) utilizando los datos del TUM RGB-D Benchmark. Puede descargar los datos a un directorio temporal utilizando un navegador web o ejecutando este código:
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Crea un objeto imageDatastore para almacenar todas las imágenes RGB.
imageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/";
imds = imageDatastore(imageFolder);Especifique los parámetros intrínsecos de su cámara y utilícelos para crear un objeto SLAM visual monocular.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); vslam = monovslam(intrinsics,TrackFeatureRange=[30,120]);
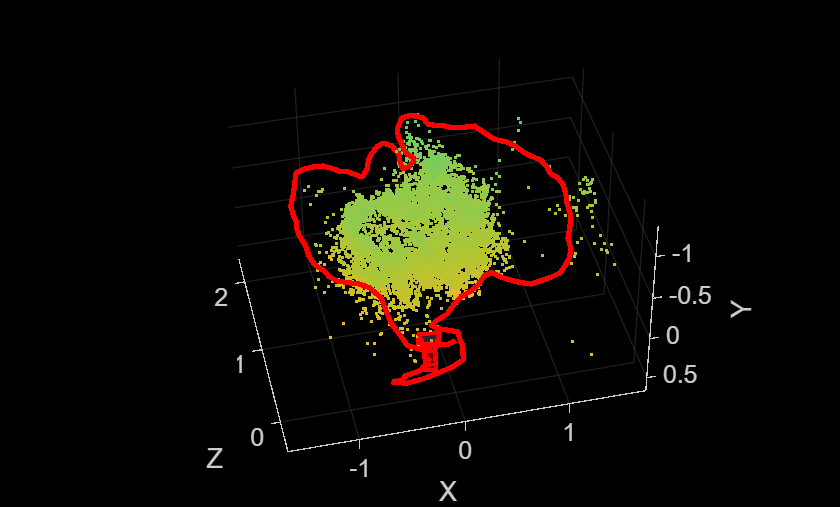
Procese cada fotograma de la imagen y visualice las poses de la cámara y los puntos del mapa 3D. Tenga en cuenta que el objeto monovslam ejecuta varias partes del algoritmo en subprocesos separados, lo que puede introducir una latencia en el procesamiento de un cuadro de imagen agregado mediante la función addFrame.
for i = 1:numel(imds.Files) addFrame(vslam,readimage(imds,i)) if hasNewKeyFrame(vslam) % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); end
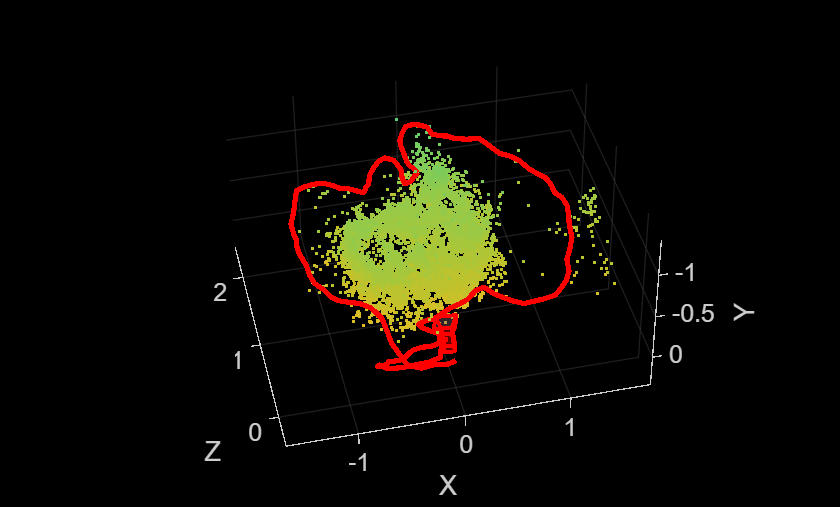
Grafique los resultados intermedios y espere hasta que se procesen todas las imágenes.
while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
Una vez procesadas todas las imágenes, puedes recopilar los puntos del mapa 3D finales y las poses de la cámara para un análisis posterior.
xyzPoints = mapPoints(vslam);
[camPoses,addedFramesIdx] = poses(vslam);
% Reset the system
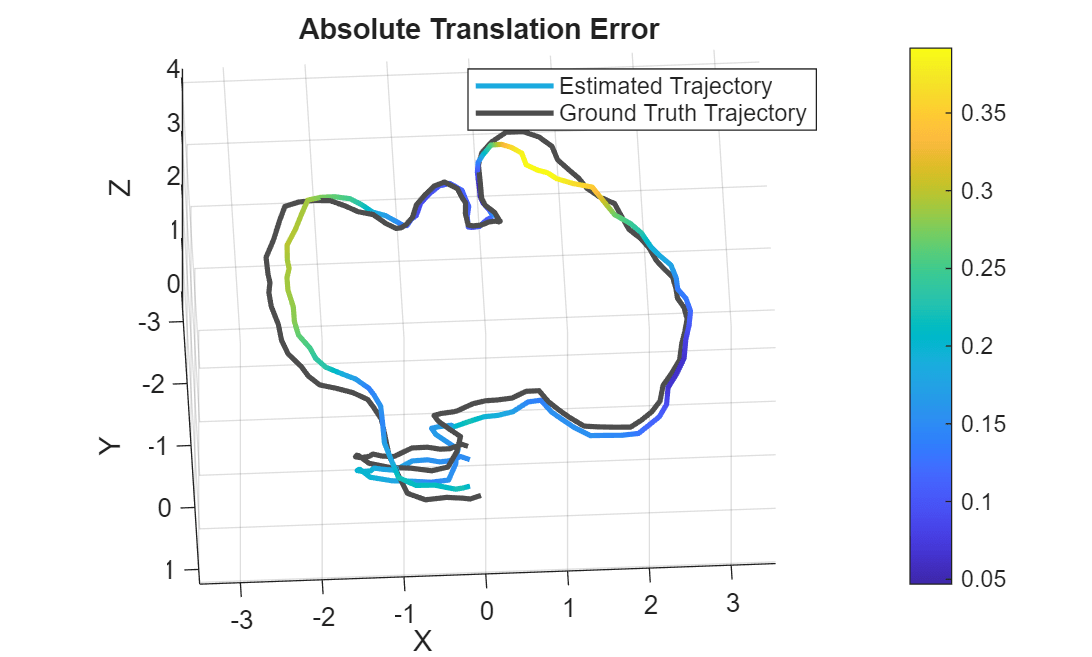
reset(vslam)Compare la trayectoria estimada de la cámara con la ground-truth para evaluar la precisión.
% Load ground truth gTruthData = load("orbslamGroundTruth.mat"); gTruth = gTruthData.gTruth; % Evaluate tracking accuracy mtrics = compareTrajectories(camPoses, gTruth(addedFramesIdx), AlignmentType="similarity"); disp(['Absolute RMSE for key frame location (m): ', num2str(mtrics.AbsoluteRMSE(2))]);
Absolute RMSE for key frame location (m): 0.20043
% Plot the absolute translation error at each key frame figure ax = plot(mtrics, "absolute-translation"); view(ax, [2.70 -49.20]);
Argumentos de entrada
Historial de versiones
Introducido en R2025a
Consulte también
Objetos
Funciones
checkStatus|isDone|addFrame|poses|mapPoints|plot|hasNewKeyFrame