Optimización minimax
Este ejemplo muestra cómo resolver un problema de diseño de filtro no lineal utilizando un algoritmo de optimización minimax, fminimax, en Optimization Toolbox™. Observe que, para ejecutar este ejemplo, debe tener instalada Signal Processing Toolbox™.
Establecer parámetros de precisión finita
Considere un ejemplo para el diseño de filtros de precisión finita. Para ello, es necesario que especifique no solo los parámetros del diseño del filtro como la frecuencia de corte y el número de coeficientes, sino también cuántos bits hay disponibles, dado que el diseño tiene una precisión finita.
nbits = 8; % How many bits have we to realize filter maxbin = 2^nbits-1; % Maximum number expressable in nbits bits n = 4; % Number of coefficients (order of filter plus 1) Wn = 0.2; % Cutoff frequency for filter Rp = 1.5; % Decibels of ripple in the passband w = 128; % Number of frequency points to take
En primer lugar, diseño continuo
Este es un diseño de filtro continuo; utilizamos cheby1, pero podríamos usar también ellip, yulewalk o remez aquí:
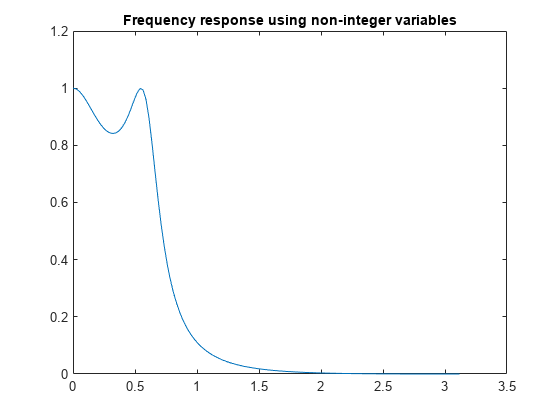
[b1,a1] = cheby1(n-1,Rp,Wn); [h,w] = freqz(b1,a1,w); % Frequency response h = abs(h); % Magnitude response plot(w, h) title('Frequency response using non-integer variables')
x = [b1,a1]; % The design variablesEstablecer límites para los coeficientes del filtro
Ahora establecemos límites en los valores máximo y mínimo:
if (any(x < 0)) % If there are negative coefficients - must save room to use a sign bit % and therefore reduce maxbin maxbin = floor(maxbin/2); vlb = -maxbin * ones(1, 2*n)-1; vub = maxbin * ones(1, 2*n); else % otherwise, all positive vlb = zeros(1,2*n); vub = maxbin * ones(1, 2*n); end
Coeficientes de escala
Establezca el valor mayor igual a maxbin y escale otros coeficientes del filtro de forma adecuada.
[m, mix] = max(abs(x)); factor = maxbin/m; x = factor * x; % Rescale other filter coefficients xorig = x; xmask = 1:2*n; % Remove the biggest value and the element that controls D.C. Gain % from the list of values that can be changed. xmask(mix) = []; nx = 2*n;
Establecer los criterios de optimización
Utilizando optimoptions, ajuste los criterios de terminaciones en valores razonablemente altos para promover tiempos de ejecución cortos. Además, active la visualización de resultados en cada iteración:
options = optimoptions('fminimax', ... 'StepTolerance', 0.1, ... 'OptimalityTolerance', 1e-4,... 'ConstraintTolerance', 1e-6, ... 'Display', 'iter');
Minimizar los valores máximos absolutos
Necesitamos minimizar los valores máximos absolutos, así que establecemos options.MinAbsMax en el número de puntos de frecuencia:
if length(w) == 1 options = optimoptions(options,'AbsoluteMaxObjectiveCount',w); else options = optimoptions(options,'AbsoluteMaxObjectiveCount',length(w)); end
Eliminar el primer valor para la optimización
Discretice y elimine el primer valor y realice la optimización llamando a FMINIMAX:
[x, xmask] = elimone(x, xmask, h, w, n, maxbin)
x = 1×8
0.5441 1.6323 1.6323 0.5441 57.1653 -127.0000 108.0000 -33.8267
xmask = 1×6
1 2 3 4 5 8
niters = length(xmask);
disp(sprintf('Performing %g stages of optimization.\n\n', niters));Performing 6 stages of optimization.
for m = 1:niters fun = @(xfree)filtobj(xfree,x,xmask,n,h,maxbin); % objective confun = @(xfree)filtcon(xfree,x,xmask,n,h,maxbin); % nonlinear constraint disp(sprintf('Stage: %g \n', m)); x(xmask) = fminimax(fun,x(xmask),[],[],[],[],vlb(xmask),vub(xmask),... confun,options); [x, xmask] = elimone(x, xmask, h, w, n, maxbin); end
Stage: 1
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 8 0 0.00329174
1 17 0.0001845 3.34e-07 1 0.0143
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Stage: 2
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 7 0 0.0414182
1 15 0.01649 0.0002558 1 0.261
2 23 0.01544 6.126e-07 1 -0.0282 Hessian modified
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Stage: 3
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 6 0 0.0716961
1 13 0.05943 -1.156e-11 1 0.776
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Stage: 4
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 5 0 0.129938
1 11 0.04278 2.937e-10 1 0.183
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Stage: 5
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 4 0 0.0901749
1 9 0.03867 -4.951e-11 1 0.256
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Stage: 6
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 3 0 0.11283
1 7 0.05033 -1.249e-16 1 0.197
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Comprobar los valores enteros más cercanos
Compruebe si los valores cercanos producen un filtro mejor.
xold = x; xmask = 1:2*n; xmask([n+1, mix]) = []; x = x + 0.5; for i = xmask [x, xmask] = elimone(x, xmask, h, w, n, maxbin); end xmask = 1:2*n; xmask([n+1, mix]) = []; x = x - 0.5; for i = xmask [x, xmask] = elimone(x, xmask, h, w, n, maxbin); end if any(abs(x) > maxbin) x = xold; end
Comparaciones de respuesta en frecuencia
En primer lugar, representamos la respuesta en frecuencia del filtro y la comparamos con un filtro donde los coeficientes solo se redondean hacia arriba o hacia abajo:
subplot(211) bo = x(1:n); ao = x(n+1:2*n); h2 = abs(freqz(bo,ao,128)); plot(w,h,w,h2,'o') title('Optimized filter versus original') xround = round(xorig)
xround = 1×8
1 2 2 1 57 -127 108 -34
b = xround(1:n); a = xround(n+1:2*n); h3 = abs(freqz(b,a,128)); subplot(212) plot(w,h,w,h3,'+') title('Rounded filter versus original')
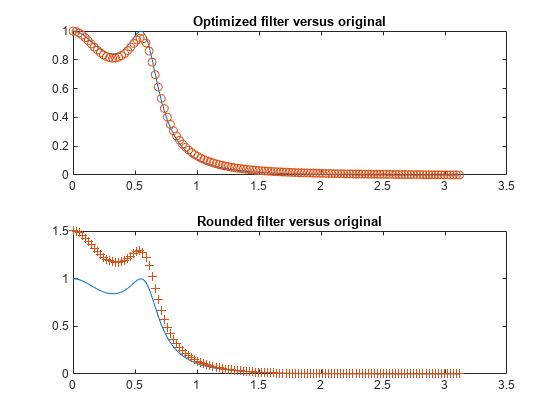
fig = gcf;
fig.NextPlot = 'replace';