Conceptos básicos de la simulación de hardware-in-the-loop
La simulación de hardware-in-the-loop (HIL) es un tipo de simulación en tiempo real. La simulación de HIL se utiliza para probar el diseño de un controlador. La simulación de HIL muestra cómo responde su controlador en tiempo real ante un estímulo virtual realista. También puede utilizar HIL para determinar si el modelo de su sistema físico (planta) es válido.
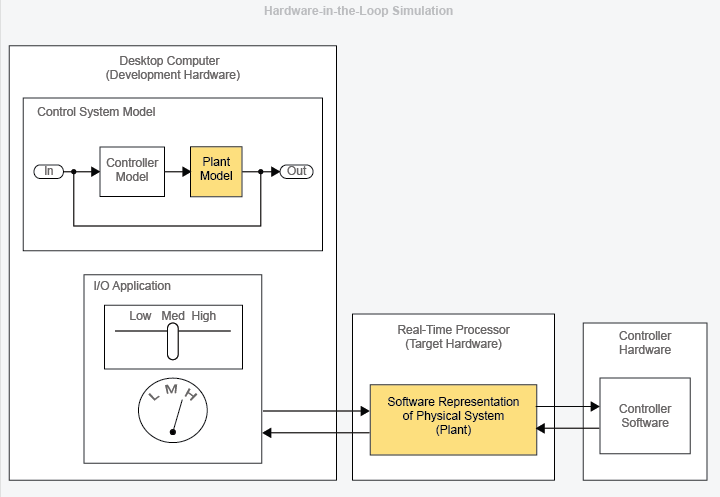
En la simulación de HIL, se utiliza un equipo en tiempo real como una representación virtual del modelo de planta y una versión real del controlador. La figura muestra una configuración típica de la simulación de HIL. El equipo de escritorio (hardware de desarrollo) contiene el modelo con capacidad de funcionar en tiempo real del controlador y la planta. El hardware de desarrollo también contiene una interfaz con la que se controla la entrada virtual a la planta. El hardware de desarrollo contiene el software del controlador que se genera a partir del modelo de controlador. El procesador en tiempo real (hardware objetivo) contiene el código para el sistema físico que se genera a partir del modelo de planta.
Cuándo utilizar la simulación de hardware-in-the-loop
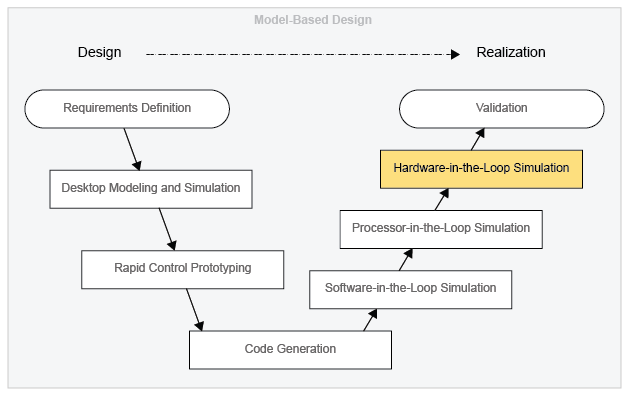
Utilice la simulación de HIL para probar el diseño de su controlador cuando esté realizando un diseño basado en modelos (MBD). La figura muestra dónde aplicar la simulación de HIL en el flujo de trabajo del diseño a la puesta en marcha del MBD.
La validación implica utilizar hardware de planta real para probar el controlador en situaciones reales o en representaciones del entorno (por ejemplo, una cámara de presión). Para la simulación de HIL, no es necesario usar el hardware real del sistema físico (planta). Tampoco es necesario basarla en una configuración de prueba naturalista o del entorno. Debido a que la simulación de HIL permite utilizar su modelo para representar la planta, este tipo de simulación ofrece ventajas en cuanto a costes y practicidad.
Existen varias áreas en las que la simulación de HIL ofrece un ahorro de los costes en comparación con las pruebas de validación. La simulación de HIL tiende a ser menos costosa en lo que respecta a los cambios de diseño. Puede realizar la simulación de HIL antes que la validación en el flujo de trabajo MBD, de manera que pueda identificar y rediseñar problemas en una fase relativamente temprana del proyecto. Estos son algunos beneficios de la detección temprana de problemas:
Es más posible que el grupo de trabajo apruebe los cambios.
La implementación de los cambios de diseño es menos costosa.
En términos de planificación, la simulación de HIL es menos costosa y más práctica que la validación, dado que puede configurarla para que se ejecute por su propia cuenta.
La simulación de HIL es más práctica que la validación para probar las respuestas del controlador ante eventos inusuales. Por ejemplo, puede crear un modelo de condiciones meteorológicas extremas, como terremotos o tormentas de nieve. También puede probar cómo responde su controlador ante estímulos que se producen en entornos inaccesibles, como las profundidades marinas o el espacio lejano.