Simulación en tiempo real de Simscape
Puede utilizar un modelo de Simscape como el modelo de planta para una prueba de hardware-in-the-loop (HIL). Cuando prepare un modelo para HIL, haga cambios que equilibren el rendimiento y la fidelidad hasta que el modelo pueda ejecutarse en el hardware objetivo a velocidad en tiempo real. En su equipo de escritorio, puede usar Simscape para desarrollar el modelo de planta e integrarlo con el modelo de controlador. Una vez que el modelo esté preparado para la ejecución en tiempo real y que el hardware y el software del controlador estén disponibles, puede desplegar el modelo de planta en una plataforma objetivo en tiempo real. La figura muestra el proceso de simulación de HIL.
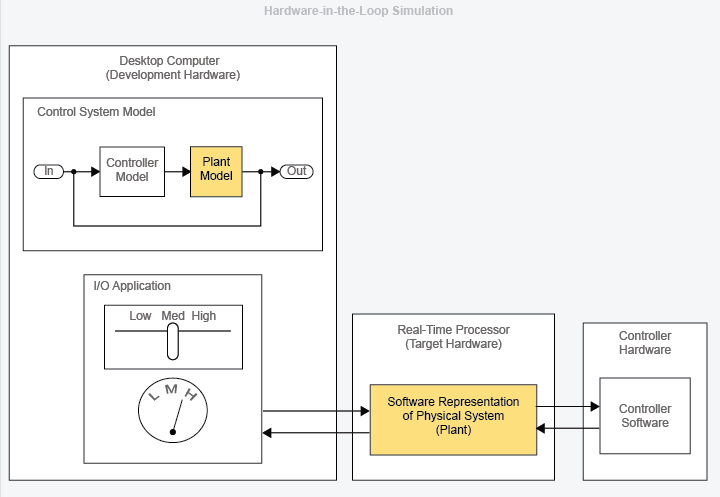
Para aplicaciones que requieren unidades de tiempo más pequeñas de las que puede simular la CPU del sistema objetivo, puede desplegar el modelo en una FPGA montada en la plataforma objetivo en tiempo real usando HDL Coder™. Cuando el modelo esté preparado para la plataforma objetivo en tiempo real, puede utilizar Simulink® Real-Time™ para desplegar el modelo.
Categorías
- Preparación del modelo en tiempo real
Obtenga resultados de referencia, optimice el rendimiento
- Generación de código HDL en FPGA
Genere código HDL a partir de modelos de Simscape para un despliegue en FPGA en tiempo real
- Despliegue en tiempo real
Flujo de trabajo de la simulación de hardware-in-the-loop, interfaz de hardware host-to-target, parámetros de ejecución