occupancyMap
Description
occupancyMap creates a 2-D occupancy grid map object. Each
cell in the occupancy grid has a value representing the probability of the occupancy of
that cell. Values close to 1 represent a high probability that the cell contains an
obstacle. Values close to 0 represent a high probability that the cell is not occupied
and obstacle free.
Occupancy maps are used in navigation algorithms such as path planning (see plannerRRT).
They are also used in mapping applications for finding collision-free paths, performing
collision avoidance, and calculating localization (see monteCarloLocalization). You can modify your occupancy map to fit your
specific application.
The occupancyMap objects support local coordinates, world
coordinates, and grid indices. The first grid location with index
(1,1) begins in the top-left corner of the grid.
Use the occupancyMap class to create 2-D maps of an environment
with probability values representing different obstacles in your world. You can specify
exact probability values of cells or include observations from sensors such as laser
scanners.
Probability values are stored using a binary Bayes filter to estimate the occupancy of
each grid cell. A log-odds representation is used, with values stored as
int16 to reduce the map storage size and allow for real-time
applications.
Creation
Syntax
Description
map = occupancyMap(width,height,resolution)resolution sets the Resolution property.
map = occupancyMap(rows,cols,resolution,'grid')rows and
cols sets the GridSize property.
map = occupancyMap(p)p. The
grid size matches the size of the matrix, with each cell probability value
interpreted from the matrix location.
map = occupancyMap(p,resolution)
map = occupancyMap(
creates an object using values from another sourcemap)occupancyMap
object.
map = occupancyMap(
creates an object using values from another sourcemap,resolution)occupancyMap
object, but resamples the matrix to have the specified resolution.
Input Arguments
Properties
Object Functions
checkOccupancy | Check if locations are free or occupied |
copy | Create copy of 2-D occupancy map |
getOccupancy | Get occupancy probability of locations |
grid2local | Convert grid indices to local coordinates |
grid2world | Convert grid indices to world coordinates |
inflate | Inflate each occupied location |
insertRay | Insert ray from laser scan observation |
local2grid | Convert local coordinates to grid indices |
local2world | Convert local coordinates to world coordinates |
move | Move map in world frame |
occupancyMatrix | Convert occupancy map to matrix |
raycast | Compute cell indices along a ray |
rayIntersection | Find intersection points of rays and occupied map cells |
setOccupancy | Set occupancy probability of locations |
show | Display 2-D occupancy map |
syncWith | Sync map with overlapping map |
updateOccupancy | Update occupancy probability at locations |
world2grid | Convert world coordinates to grid indices |
world2local | Convert world coordinates to local coordinates |
Examples
Insert Laser Scans into Occupancy Map
Create an empty occupancy grid map.
map = occupancyMap(10,10,20);
Specify the pose of the vehicle, ranges, angles, and the maximum range of the laser scan.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Create a lidarScan object with the specified ranges and angles.
scan = lidarScan(ranges,angles);
Insert the laser scan data into the occupancy map.
insertRay(map,pose,scan,maxrange);
Show the map to see the results of inserting the laser scan.
show(map)
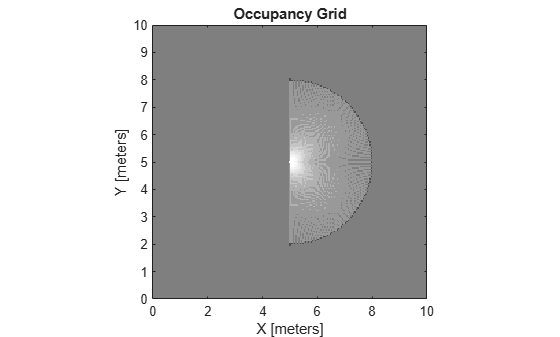
Check the occupancy of the spot directly in front of the vehicle.
getOccupancy(map,[8 5])
ans = 0.7000
Add a second reading and view the update to the occupancy values. The additional reading increases the confidence in the readings. The free and occupied values become more distinct.
insertRay(map,pose,scan,maxrange); show(map)
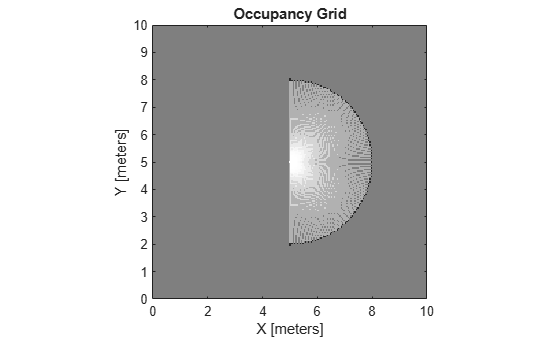
getOccupancy(map,[8 5])
ans = 0.8448
Convert PGM Image to Map
Convert a portable graymap (PGM) file containing a ROS map into an occupancyMap for use in MATLAB.
Import the image using imread. Crop the image to the playpen area.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)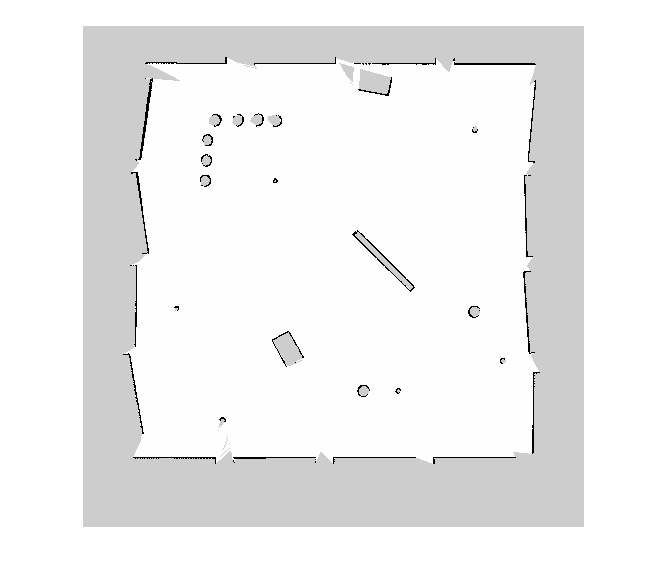
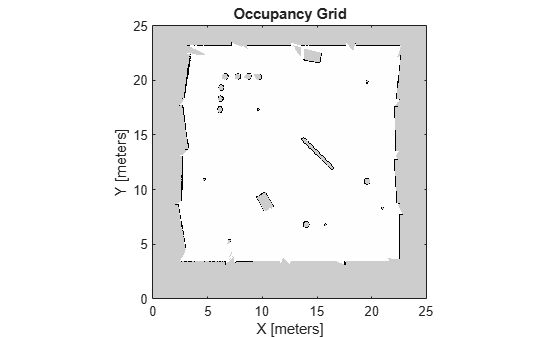
PGM values are expressed from 0 to 255 as uint8. Normalize these values by converting the cropped image to double and dividing each cell by 255. This image shows obstacles as values close to 0. Subtract the normalized image from 1 to get occupancy values with 1 representing occupied space.
imageNorm = double(imageCropped)/255; imageOccupancy = 1 - imageNorm;
Create the occupancyMap object using an adjusted map image. The imported map resolution is 20 cells per meter.
map = occupancyMap(imageOccupancy,20); show(map)
Limitations
Occupancy values have a limited resolution of ±0.001. The values are stored as
int16 using a log-odds representation. This data type limits
resolution, but saves memory when storing large maps in MATLAB®. When calling setOccupancy and then
getOccupancy, the value returned might not equal the value you
set. For more information, see the log-odds representations section in Occupancy Grids.
If memory size is a limitation, consider using binaryOccupancyMap
instead. The binary occupancy map uses less memory with binary values, but still works
with Navigation Toolbox™ algorithms and other applications.
Extended Capabilities
Version History
Introduced in R2019b
See Also
binaryOccupancyMap | mobileRobotPRM (Robotics System Toolbox) | controllerPurePursuit (Robotics System Toolbox) | rosReadOccupancyGrid (ROS Toolbox) | rosWriteOccupancyGrid (ROS Toolbox)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)