tfestimate
Estimación de la función de transferencia
Sintaxis
Descripción
txy = tfestimate(x,y)x y la señal de salida y evaluada en un conjunto de frecuencias.
Si
xeyson ambos vectores, deben tener la misma longitud.Si una de las señales es una matriz y la otra es un vector, la longitud del vector debe ser igual al número de filas de la matriz. La función expande el vector y devuelve una matriz de estimaciones de la función de transferencia columna por columna.
Si
xeyson matrices con el mismo número de filas pero con diferente número de columnas,txyes una función de transferencia multi-entrada y multi-salida (MIMO) que combina todas las señales de entrada y salida.txyes un arreglo tridimensional. Sixtiene m columnas eytiene n columnas,txytiene n columnas y m páginas. Para obtener más información, consulte Función de transferencia.Si
xeyson matrices del mismo tamaño,tfestimateopera por columnas:txy(:,n) = tfestimate(x(:,n),y(:,n)). Para obtener una estimación MIMO, añada'mimo'a la lista de argumentos.
txy = tfestimate(___,'mimo')
[ devuelve un vector de frecuencias, txy,f] = tfestimate(___,fs)f, expresado en términos de la tasa de muestreo, fs, a la que se estima la función de transferencia. fs debe ser la sexta entrada numérica a tfestimate. Para generar una tasa de muestreo y seguir utilizando los valores predeterminados de los argumentos opcionales anteriores, especifique estos argumentos como vacíos, [].
[___] = tfestimate(___,'Estimator', estima las funciones de transferencia con el estimador est)est. Las opciones válidas para est son 'H1' y 'H2'.
tfestimate(___) sin argumentos de salida representa la estimación de la función de transferencia en la ventana de la figura actual.
Ejemplos
Calcule y represente la estimación de la función de transferencia entre dos secuencias, x e y. La secuencia x consiste en ruido blanco gaussiano. y resulta de filtrar x con un filtro de paso bajo de 30.º orden con frecuencia de corte normalizada de rad/muestra. Utilice una ventana rectangular para diseñar el filtro. Especifique una tasa de muestreo de 500 Hz y una ventana de Hamming de longitud 1024 para estimar la función de transferencia.
h = fir1(30,0.2,rectwin(31)); x = randn(16384,1); y = filter(h,1,x); fs = 500; tfestimate(x,y,1024,[],[],fs)
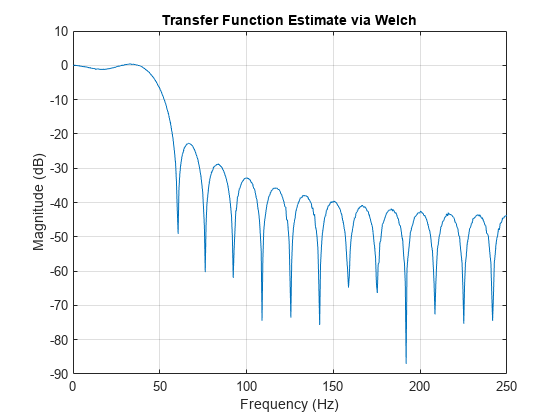
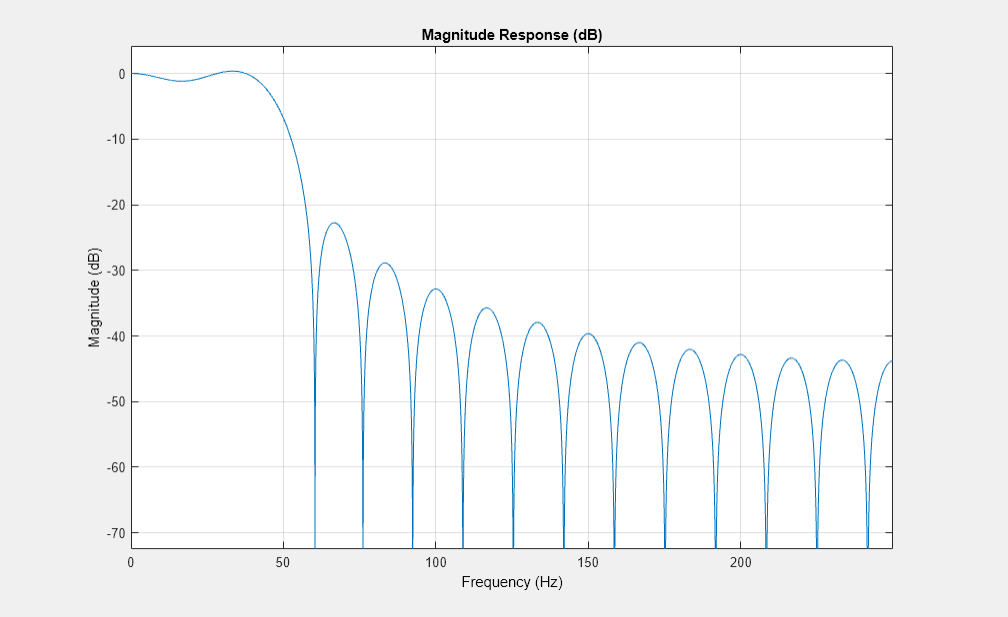
Verifique que la función de transferencia se aproxima a la respuesta en frecuencia del filtro.
freqz(h,1,[],fs)
Obtenga el mismo resultado devolviendo la estimación de la función de transferencia en una variable y representando su valor absoluto en decibelios.
[Txy,f] = tfestimate(x,y,1024,[],[],fs); plot(f,mag2db(abs(Txy)))

Estime la función de transferencia de un sistema simple de una entrada y una salida y compárela con la definición.
Un sistema oscilante unidimensional de tiempo discreto consiste en una masa unitaria, (en kg), unida a una pared por un muelle de constante elástica unitaria. Un sensor muestrea la aceleración, , de la masa a Hz. Un amortiguador impide el movimiento de la masa ejerciendo sobre ella una fuerza proporcional a la velocidad, con una constante de amortiguación kg/s.

Genere 2000 muestras de tiempo. Defina el intervalo de muestreo .
Fs = 1; dt = 1/Fs; N = 2000; t = dt*(0:N-1); b = 0.01;
El sistema puede describirse mediante el modelo de espacio de estados
donde es el vector de estado, y son respectivamente la posición y la velocidad de la masa, es la fuerza motriz y es la salida medida. Las matrices de espacio de estados son
es la identidad y las matrices de espacio de estados en tiempo continuo son
Ac = [0 1;-1 -b]; A = expm(Ac*dt); Bc = [0;1]; B = Ac\(A-eye(size(A)))*Bc; C = [-1 -b]; D = 1;
Durante la mitad del intervalo de medición, una entrada aleatoria impulsa la masa. Utilice el modelo de espacio de estados para calcular la evolución temporal del sistema partiendo de un estado inicial totalmente nulo. Represente la aceleración de la masa como una función de tiempo.
rng("default") u = zeros(1,N); u(1:N/2) = randn(1,N/2); y = 0; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end plot(t,y)

Estime la función de transferencia del sistema como una función de frecuencia. Utilice 2048 puntos de la DFT y especifique una ventana de Kaiser con un factor de forma de 15. Utilice el valor predeterminado de solapamiento entre segmentos contiguos.
nfs = 2048; wind = kaiser(N,15); [txy,ft] = tfestimate(u,y,wind,[],nfs,Fs);
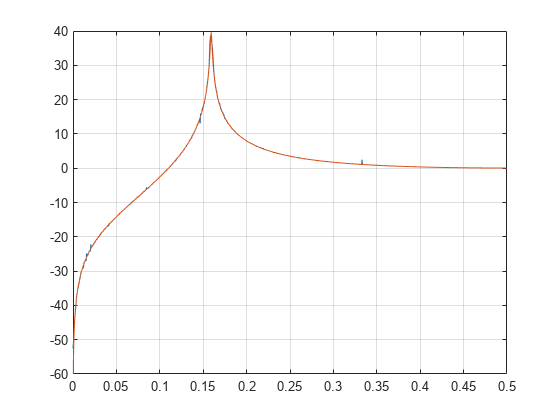
La función frecuencia-respuesta de un sistema de tiempo discreto puede expresarse como la transformada Z de la función de transferencia del sistema en el dominio del tiempo, evaluada en el círculo unitario. Compruebe que la estimación calculada por tfestimate coincide con esta definición.
[b,a] = ss2tf(A,B,C,D); fz = 0:1/nfs:1/2-1/nfs; z = exp(2j*pi*fz); frf = polyval(b,z)./polyval(a,z); plot(ft,mag2db(abs(txy))) hold on plot(fz,mag2db(abs(frf))) hold off grid ylim([-60 40])
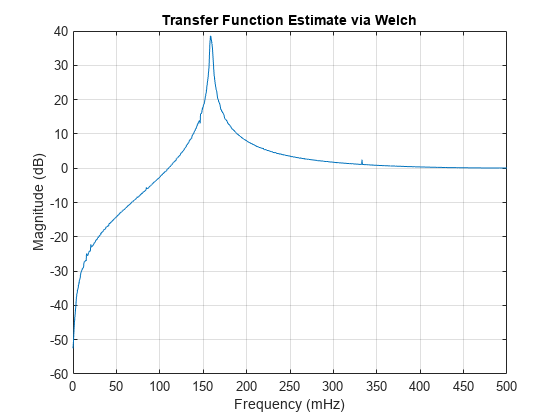
Represente la estimación utilizando la funcionalidad incorporada de tfestimate.
tfestimate(u,y,wind,[],nfs,Fs)
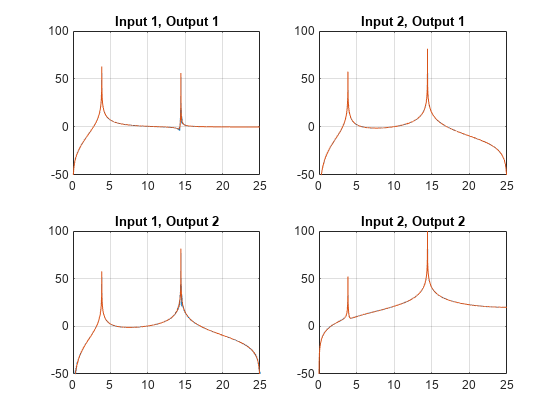
Estime la función de transferencia de un sistema multi-entrada y multi-salida (MIMO).
Dos masas conectadas a un muelle y a un amortiguador a cada lado forman un sistema oscilante unidimensional ideal de tiempo discreto. El arreglo de entrada del sistema u consta de fuerzas motrices aleatorias aplicadas a las masas. El arreglo de salida del sistema y contiene los desplazamientos observados de las masas desde sus posiciones de referencia iniciales. El sistema se muestrea a una tasa Fs de 40 Hz.

Cargue el archivo de datos que contiene las entradas del sistema MIMO, las salidas del sistema y la tasa de muestreo. En el ejemplo Frequency-Response Analysis of MIMO System se analiza el sistema que generó los datos utilizados en este ejemplo.
load MIMOdataEstime y represente gráficamente las funciones de transferencia de dominio de frecuencia del sistema utilizando los datos del sistema y la función tfestimate. Seleccione la opción "mimo" para producir las cuatro funciones de transferencia. Utilice puntos de muestreo para calcular la transformada discreta de Fourier, divida la señal en segmentos de 5000 muestras y aplique una ventana de Hann a cada uno. Especifique 2500 muestras de solapamiento entre segmentos contiguos.
wind = hann(5000); nfs = 2^14; nov = 2500; [tXY,ft] = tfestimate(u,y,wind,nov,nfs,Fs,"mimo"); tiledlayout flow for jk = 1:2 for kj = 1:2 nexttile plot(ft,mag2db(abs(tXY(:,jk,kj)))) grid on ylim([-120 0]) title("Input "+jk+", Output "+kj) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") end end
Argumentos de entrada
Argumentos de salida
Más acerca de
Algoritmos
tfestimate utiliza el método del periodograma promediado de Welch. Para obtener más detalles, consulte pwelch.
Referencias
[1] Vold, Håvard, John Crowley, and G. Thomas Rocklin. “New Ways of Estimating Frequency Response Functions.” Sound and Vibration. Vol. 18, November 1984, pp. 34–38.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006aConsulte también
cpsd | mscohere | periodogram | pwelch