Modelar la fricción de movimiento slick-slip y los topes rígidos en un sistema de masa-resorte-amortiguador
Este ejemplo muestra cómo incorporar topes rígidos y variaciones en la fricción debidas al movimiento slick-slip en un modelo de masa-resorte-amortiguador.
En un modelo de masa-resorte-amortiguador, una masa se fija al extremo de un resorte. El resorte tiene una longitud nominal que puede estirarse y comprimirse en respuesta a fuerzas externas. La constante del resorte determina la fuerza que ejerce este sobre la masa en función de lo que se estire o comprima el resorte.
Cuando el sistema limita la posición de la masa, esos límites representan topes rígidos en las oscilaciones de la masa sobre el resorte. Cuando la masa alcanza el límite superior o inferior de su posición, se detiene con fuerza, lo que significa que la velocidad pasa a 0.
El movimiento slick-slip puede producirse cuando dos superficies se mueven una contra otra de forma dinámica. Por ejemplo, en el sistema de masa-resorte-amortiguador, la masa se desplaza sobre una superficie mientras oscila sobre el resorte. La fricción entre la masa y la superficie cambia cuando la velocidad de la masa llega a 0. La masa se adhiere cuando la fricción estática es mayor que la fuerza del resorte y se desliza cuando la fuerza del resorte supera la fricción estática.
Abrir y analizar un modelo
Abra el modelo sldemo_hardstop. El modelo contiene un subsistema denominado Friction Model que calcula la fuerza debida a la fricción y dos bloques Integrator que calculan la velocidad y la posición de la masa.
mdl = "sldemo_hardstop";
open_system(mdl)
El bloque Integrator que calcula la velocidad está configurado para lo siguiente:
Proporcionar el valor de estado como salida.
Restablecer el valor de salida a 0 m/s en función de una señal externa.
Tener un estado inicial de 100 m/s.
El bloque Integrator que calcula la posición modela los topes rígidos del sistema limitando el rango del valor de salida a partir de las posiciones mínima y máxima posibles. El bloque tiene un puerto de salida adicional con una señal que indica el momento en que el valor de salida alcanza uno de los límites, lo que significa que la masa ha alcanzado la posición mínima o máxima. Para modelar el tope rígido, la señal de límite restablece el bloque Integrator que calcula la velocidad a una velocidad de 0 m/s.
Ver y analizar el modelo de fricción
Para ver el contenido del subsistema denominado Friction Model, haga doble clic en el bloque del subsistema o use la función open_system.
open_system(mdl + "/Friction Model")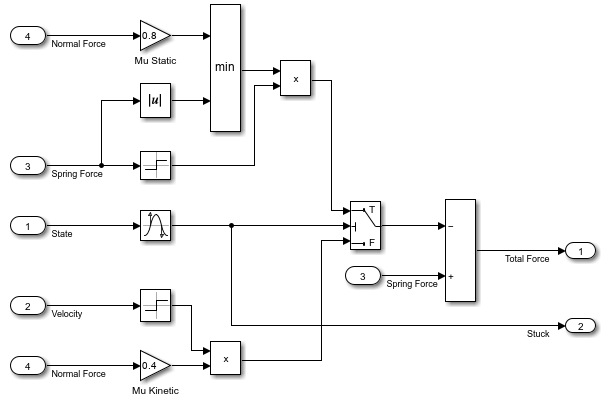
El subsistema calcula dos salidas: la fuerza total que actúa sobre la masa y un indicador que muestra el momento en que la masa se adhiere y tiene una velocidad de cero.
Para determinar el momento en que la masa tiene una velocidad de cero, el subsistema usa el estado del bloque Integrator que calcula la velocidad de la masa. El estado del bloque Integrator es la velocidad del momento específico principal anterior de la simulación. En el momento específico principal después de que la velocidad llegue a cero, el modelo de fricción hace lo siguiente:
Establece el indicador
Stuck, que restablece el bloque Integrator que calcula la velocidadCambia el cálculo de la fricción para usar el coeficiente estático de fricción en lugar del coeficiente cinético de fricción
Para calcular la fuerza total que actúa sobre la masa, el subsistema suma la fuerza del resorte a la fuerza de la fricción cinética o estática.
Cuando usa el puerto de estado del bloque Integrator que calcula la velocidad para determinar el momento en que la masa está retenida, evita crear un bucle algebraico en el modelo.
Simular el modelo y analizar los resultados
Simule el modelo. En la barra de herramientas de Simulink®, en la pestaña Simulation, pulse Run. Otra opción es ejecutar la simulación con la función sim.
out = sim(mdl);
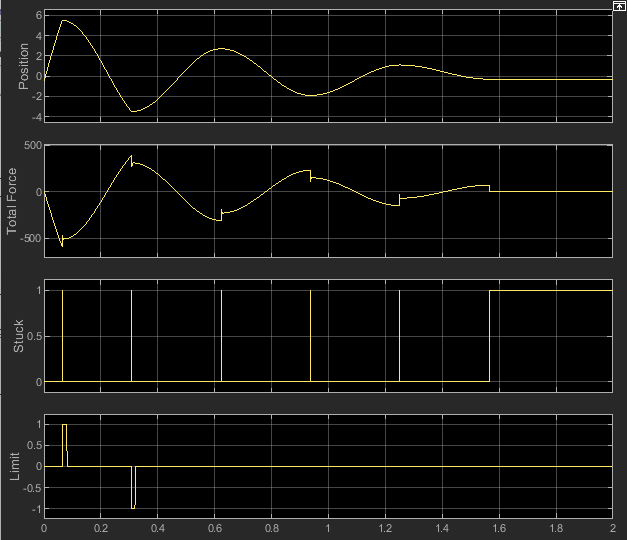
Haga doble clic en el bloque Scope flotante para ver los resultados de la simulación.
La disminución de los valores mínimos y máximos de la señal de posición en la gráfica superior ilustra la forma en que la fricción consume energía en el sistema.
Las discontinuidades en el valor de la fuerza total de la segunda gráfica muestran el efecto de usar el coeficiente de fricción estática cuando la masa se adhiere y su velocidad llega a cero.
La tercera gráfica muestra que los momentos específicos con discontinuidades corresponden a momentos en los que se ha activado el indicador
Stuck. El indicadorStuckpermanece activado después de un tiempo de simulación cercano a 1,6 segundos porque la masa ha llegado al reposo.La última gráfica muestra que solo se produjo un tope rígido dos veces, al principio de la simulación.