Magnetic Core

Libraries:
Simscape /
Electrical /
Passive
Description
The Magnetic Core block models magnetic reluctance with hysteresis. Use this block to model custom inductances and build transformer models. To connect this block to your electrical network, use an Electromagnetic Converter block or a Winding block to represent the interface between the electrical and magnetic domains.
The block uses the Jiles-Atherton model to calculate the magnetic flux density B and magnetic field strength H. You can choose to specify the Jiles-Atherton parameters directly, specify characteristic magnetic parameters, or tabulate the B-H saturation curve using the Parameterization option parameter.
To define the geometry for the part of the magnetic network that you are modeling, use the Effective length and Effective cross-sectional area parameters. The block uses this geometry information to map B and H to the magnetomotive force and magnetic flux, which are the Through and Across variables in the magnetic domain.
To model eddy losses, in the Losses settings, select the Model eddy losses parameter. To model thermal effects, in the Thermal settings, select the Model thermal effects parameter.
Equations
These equations define the flux density and magnetomotive force,
where:
B is the magnetic flux density induced in the core.
φ is the magnetic flux.
seff is the value of the Effective cross-sectional area parameter.
mmf is the magnetomotive force (mmf) across the component.
leff is the value of the Effective length parameter.
H is the total field strength.
This equation relates B and H to the total magnetization of the core M,
where μ0 is the magnetic permeability of a vacuum.
The magnetization acts to increase the magnetic flux density, and its value depends on both the current value and the history of the field strength. The block uses the Jiles-Atherton [1,2] equations to determine M at any given time. This figure shows a typical plot of the resulting relationship between B and H.

In this figure:
Bm is the magnetic flux density at the saturation point.
Br is the magnetic remanence of the saturation cycle.
Hc is the magnetic coercivity of the saturation cycle.
Hm is the magnetic field intensity at the saturation point.
As the field strength increases from H = 0, the plot initially follows an ascending hysteresis curve. At the saturation point, further increases in field intensity no longer cause significant increases in magnetic flux.
As you reduce the magnetic field strength from the saturation point, the plot follows a descending hysteresis curve. The difference between ascending and descending curves is due to the dependence of M on the trajectory history. Physically, the behavior corresponds to magnetic dipoles in the core aligning as the field strength increases, but not then fully recovering to their original position as field strength decreases.
The starting point for the Jiles-Atherton equation is the split of the magnetization effect into two parts, one part that is purely a function of effective field strength Heff and another, irreversible part that depends on history. This equation defines the relative contributions of the anhysteretic magnetization Man and the irreversible magnetization Mirr to the total magnetization M,
where c is the coefficient for reversible magnetization.
This equation relates Man to the equivalent magnetization Heff:
The function defines a saturation curve with limiting values ±Ms, where:
Ms is the saturation magnetization.
a is the anhysteretic magnetization coefficient, which determines the point of saturation. It approximately describes the average of the two hysteretic curves.
The Jiles-Atherton model defines the irreversible term by a partial derivative with respect to field strength,
where:
k is the bulk coupling coefficient, which shapes the irreversible characteristic.
α is the inter-domain coupling factor.
Comparison of the equation with a standard first-order differential equation reveals that as you change the total field strength H, the irreversible term Mirr attempts to track the reversible term Man, but with a variable tracking gain of . The tracking error acts to create the hysteresis at the points where δ changes sign.
This equation defines the effective field strength of an anhysteretic curve without eddy losses,
The value of α affects the shape of the hysteresis curve. Larger values act to increase the B-axis intercepts. However, the stability term must be positive for δ > 0 and negative for δ < 0. There are therefore limits on the values of α that you can provide. A typical maximum value is of the order 1e-3.
You can choose how to parameterize the B-H curve. Set the Parameterization option parameter to one of these options:
Jiles-Atherton Model— Specify the Jiles-Atherton parameters directly:Saturation magnetization Ms
Anhysteretic magnetization constant a
Inter-domain coupling factor α
Coefficient for reversible magnetization c
Bulk coupling coefficient k
Saturated BH Curve— Tabulate the ascending or descending B-H curve. You must specify at least one data point in the first and third quadrant. For ascending curves, you must also specify at least one point in the fourth quadrant. For descending curves, you must also specify at least one point in the second quadrant.Magnetic Characteristics— Specify the magnitude of the B and H intercepts, Br and Hc, and the magnitude of B and H at the saturation point, Bm and Hm.
To model inner hysteresis loops, the Magnetic Core block keeps constant in a region of the B-H curve near where δ changes sign. If this gradient is sufficiently steep that the inner loop does not return to the origin when the core demagnetizes, the block instead bounds to so that the curve returns to the origin (since R2026a).
Before R2026a: The Magnetic Core block assumes that the core is fully saturated, creating wide flat regions in the inner hysteresis loops that do not exist in practice.
Model Losses
The block computes hysteresis losses and eddy current losses.
The block calculates hysteresis losses using an averaging time. The instantaneous value of the area inside the B-H curve is proportional to the sum of the magnetic energy of the core and the thermal power dissipation. To obtain accurate results, you must specify an Averaging period for hysteresis losses parameter value that is greater than the B-H cycle time. If you specify a smaller value, the hysteresis loss at some instances is equal to the magnetic energy of the core which is larger than the real losses. The best option is to specify a value that is an exact multiple of the B-H cycle time.
These equations define the energy density dissipated by eddy currents Weddy in the time interval Δt [3-5],
where:
σ is the conductivity.
d is the value of the Thickness of laminations parameter. If the core does not have laminations, this value corresponds to the thickness at the widest cross-section; for example, the diameter of cylindrical or spherical cores.
β is the value of the Geometrical coefficient parameter. For a laminated core, β =
6. For a cylindrical core, β =16. For a spherical core, β =20[5].
Eddy currents induce a magnetic field HEddy:
This field also modifies the effective field strength:
Generate Derived Data Sheet
Since R2026a
You can generate a derived data sheet for the Magnetic Core block that contains summary tables and characteristic plots similar to those that device manufacturers provide in their data sheets. A built-in MATLAB® script calculates the block-level characteristics based on the parameter values in your model. Use derived data sheets to explore the impact of your parameter choices on device characteristics, help you select manufactured parts, or share your component-level design with other members of your organization.
The derived data sheet for the Magnetic Core block includes plots of:
Flux density versus magnetic field intensity (B-H curve):
Without eddy current effects.
With inner loops, at a fixed frequency.
With eddy current losses, at different frequencies.
Hysteresis and eddy current losses:
Versus flux density at a fixed frequency.
Versus frequency at a fixed flux density.
To generate a derived data sheet:
Open the MATLAB script by clicking the Open live script button next to the Derived data sheet parameter in the Utilities section of the block dialog box.
Click the Generate Data Sheet button in the script.
For more information about derived data sheets, see Generate Derived Data Sheets.
Variables
To set the priority and initial target values for the block variables before simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Note
In the Initial Targets section, you can specify values for the Field strength and Flux density parameters. The values you provide must approximately correspond to a point on the B-H curve.
Use nominal values to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources. One of these sources is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
Examples

Parameterize Magnetic Core Block Using B-H Curve Data
Parameterize a Magnetic Core block using B-H curve data. This block represents a magnetic core with magnetic hysteresis implementing a Jiles-Atherton model.
Model Ferrite Core Using Magnetic Core Block
Adjust the Jiles-Atherton parameters to obtain a good fit for the B-H curve of a magnetic core. The Magnetic Core block uses the Jiles-Atherton model to define the relationship between the magnetic flux density, B, and the total field strength, H. You can parametrize the block by specifying the Jiles-Atherton parameters directly. Alternatively, you can parameterize the block using saturated B-H curve data or by specifying magnetic characteristics. If you do not specify the Jiles-Atherton parameters directly, the block estimates the Jiles-Atherton parameters based on the assumption that you have a saturated iron core. This estimate is not always accurate for other types of core, such as ferrites with small values of coercivity and remanence. Always check that the B-H curve the block uses matches your input data.

Model Hysteresis and Eddy Current Losses in an Iron Core
Model the hysteresis and eddy current losses in the iron core of an electrical transformer using the Magnetic Core block. This block represents a magnetic core with magnetic hysteresis and implements the Jiles-Atherton model. You can parameterize the block using saturated B-H curve data, magnetic characteristics, or the Jiles-Atherton parameters.
Assumptions and Limitations
If you set the Parameterization option parameter to
Magnetic characteristicsorSaturated BH Curve, the Magnetic Core block estimates the Jiles-Atherton parameters based on the assumption that the core is saturated iron. This estimate is not always accurate for other types of core, such as ferrites with small values of coercivity and remanence.Note
You can obtain an initial estimate of the Jiles-Atherton parameters. Then, examine the predicted B-H curve and adjust the Jiles-Atherton parameters to get a better fit with your data. (since R2025a)
To obtain these initial estimates:
Generate a derived data sheet. (since R2026a)
Before R2026a: Run the model. MATLAB automatically displays estimates of the Jiles-Atherton parameters at the start of the simulation.
For more information, see the Model Ferrite Core Using Magnetic Core Block example.
If the thickness of the laminations is too high, the computed eddy losses can be large enough that the B-H curve extends along the H-axis far beyond the magnetic field intensity at the saturation point. If you significantly exceed this limit, instead of obtaining the typical s-shaped B-H curve, you obtain a curve with long straight lines along the top and bottom. If you receive these non-physical results, reduce the value of the Thickness of laminations parameter.
Before R2026a: The Magnetic Core block assumes that the core is fully saturated, creating wide flat regions in the inner hysteresis loops that do not exist in practice.
Ports
Conserving
Parameters
References
[1] Jiles, D. C. and D. L. Atherton. "Theory of ferromagnetic hysteresis." Journal of Magnetism and Magnetic Materials 61, no. 1–2 (September 1986): 48–60. https://doi.org/10.1016/0304-8853(86)90066-1.
[2] Jiles, D. C. and D. L. Atherton. “Ferromagnetic hysteresis.” IEEE® Transactions on Magnetics 19, no. 5 (September 1983): 2183–85. https://doi.org/10.1109/TMAG.1983.1062594.
[3] Sadowski, N., N. J. Batistela, J. P. A. Bastos, and M. Lajoie-Mazenc. “An Inverse Jiles-Atherton Model to Take into Account Hysteresis in Time-Stepping Finite-Element Calculations.” IEEE 38, no. 2 (March 2002): 797–800. https://doi.org/10.1109/20.996206.
[4] Baghel, A. P. S., and S. V. Kulkarni. “Dynamic Loss Inclusion in the Jiles–Atherton (JA) Hysteresis Model Using the Original JA Approach and the Field Separation Approach.” IEEE Transactions on Magnetics 50, no. 2 (February 2014): 369–72. https://doi.org/10.1109/TMAG.2013.2284381.
[5] Jiles, D. C. “Frequency Dependence of Hysteresis Curves in Conducting Magnetic Materials.” Journal of Applied Physics 76, no. 10 (November 1994): 5849–55. https://doi.org/10.1063/1.358399.
[6] Jiles, D. C., J. B. Thoelke, and M. K. Devine. “Numerical Determination of Hysteresis Parameters for the Modeling of Magnetic Properties Using the Theory of Ferromagnetic Hysteresis.” IEEE Transactions on Magnetics 28, no. 1 (January 1992): 27–35. https://doi.org/10.1109/20.119813.
[7] Jiles, D. C., and J. B. Thoelke. “Theory of Ferromagnetic Hysteresis: Determination of Model Parameters from Experimental Hysteresis Loops.” IEEE Transactions on Magnetics 25, no. 5 (September 1989): 3928–30. https://doi.org/10.1109/20.42480.
[8] Li, Z., X. Huang, L. Wu, J. Chen, Y. Zhong, J. Ma, and Y. Fang. “A Modified Jiles-Atherton Model for Estimating the Iron Loss of Electrical Steel Considering DC Bias.” In 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), 1–7. Monte-Carlo: IEEE, 2018. https://doi.org/10.1109/EVER.2018.8362391.
Extended Capabilities
Version History
Introduced in R2024bThe Magnetic Core block now uses a modification to the original Jiles-Atherton model that more accurately represents inner hysteresis loops.
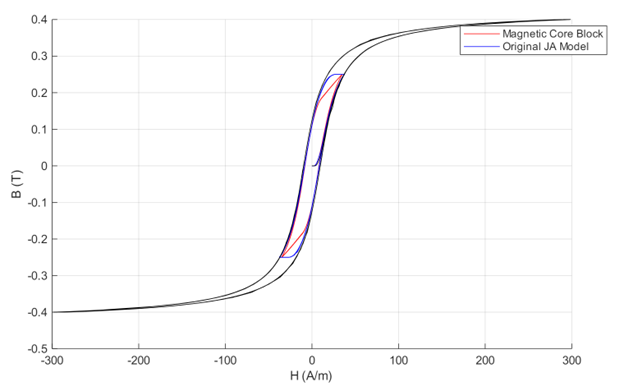
The original Jiles-Atherton model sets the derivative of the irreversible component of M with respect to H to zero when it would otherwise be negative. This implementation assumes that the core is fully saturated, creating wide, flat regions in the inner hysteresis loops that do not exist in practice. The Magnetic Core block now adjusts the derivative of M with respect to H when the magnitude of H is less is than the magnetic field intensity at the saturation point. This figure shows two B-H curves. One curve uses the original Jiles-Atherton model and the other uses the more accurate Magnetic Core block equations.
Before R2026a, the Magnetic Core block uses the original Jiles-Atherton model to calculate M.
If you created a model containing this block in an earlier release, it now returns different results for the inner loops of B-H curves than it did prior to R2026a. The new results are more accurate. The results for the outer loops of B-H curves have not changed.