Control de motor de reluctancia variable de seis fases
Este ejemplo muestra cómo controlar la velocidad del rotor de un sistema de accionamiento eléctrico basado en un motor de reluctancia variable (SRM) de seis fases. Una fuente de tensión de CC alimenta al SRM a través de un puente controlado de seis ramas. Los ángulos de activación y desactivación del convertidor se mantienen constantes.
Visión general del modelo

Resultados de simulación a partir del registro de Simscape
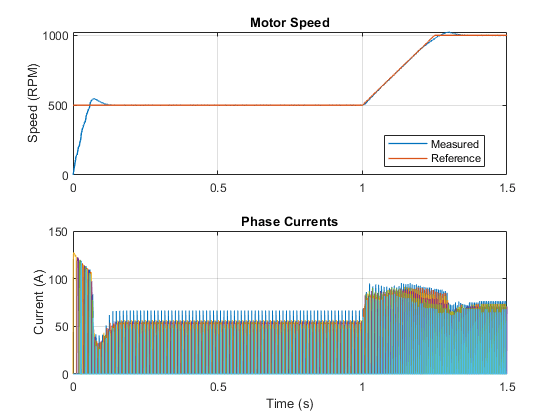
La gráfica a continuación muestra la velocidad solicitada y medida para la prueba, así como las corrientes de fase del accionamiento eléctrico.

Resultados de simulación en tiempo real
Este ejemplo se ha probado en estas plataformas:
Plataforma objetivo Speedgoat™ Performance en tiempo real con CPU Intel® 3.5 GHz i7 multicore y 4 GB de RAM.
dSPACE® SCALEXIO LabBox con Intel® Core XEON E3-1275v3 a 3.5 GHz y 4 GB de RAM.
Puede ejecutar este modelo en tiempo real con un tamaño de paso de 100 microsegundos usando el solver local de Simscape. Para tasas de muestreo pequeñas, puede producirse un desbordamiento de tarea durante la ejecución de la tarea inicial debido a una caché fría. Para evitar este desbordamiento, si la plataforma seleccionada admite estas opciones, relaje el comportamiento de arranque especificando un número limitado de desbordamientos de tarea o aumentando el tiempo de muestreo de tareas periódicas durante la fase de arranque de la aplicación en tiempo real.
Consulte también
Switched Reluctance Machine (Multi-Phase)